

Ice cream vending machine
A vending machine and ice cream technology, applied in frozen sweets, food science, applications, etc., to achieve the effects of easy access, normal and stable supply, increased supply quantity and storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
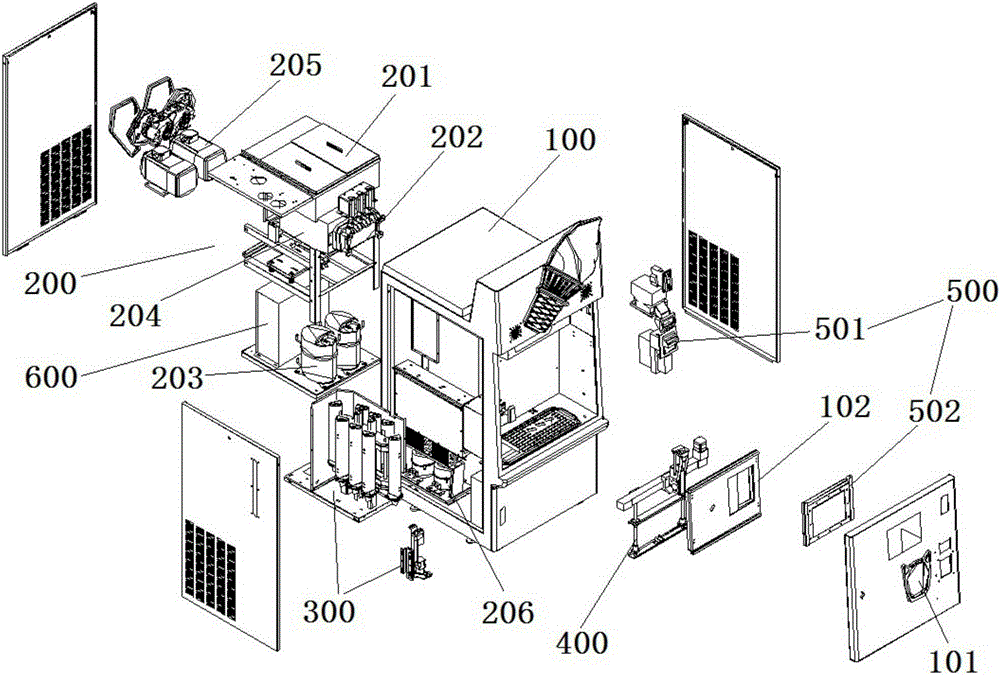
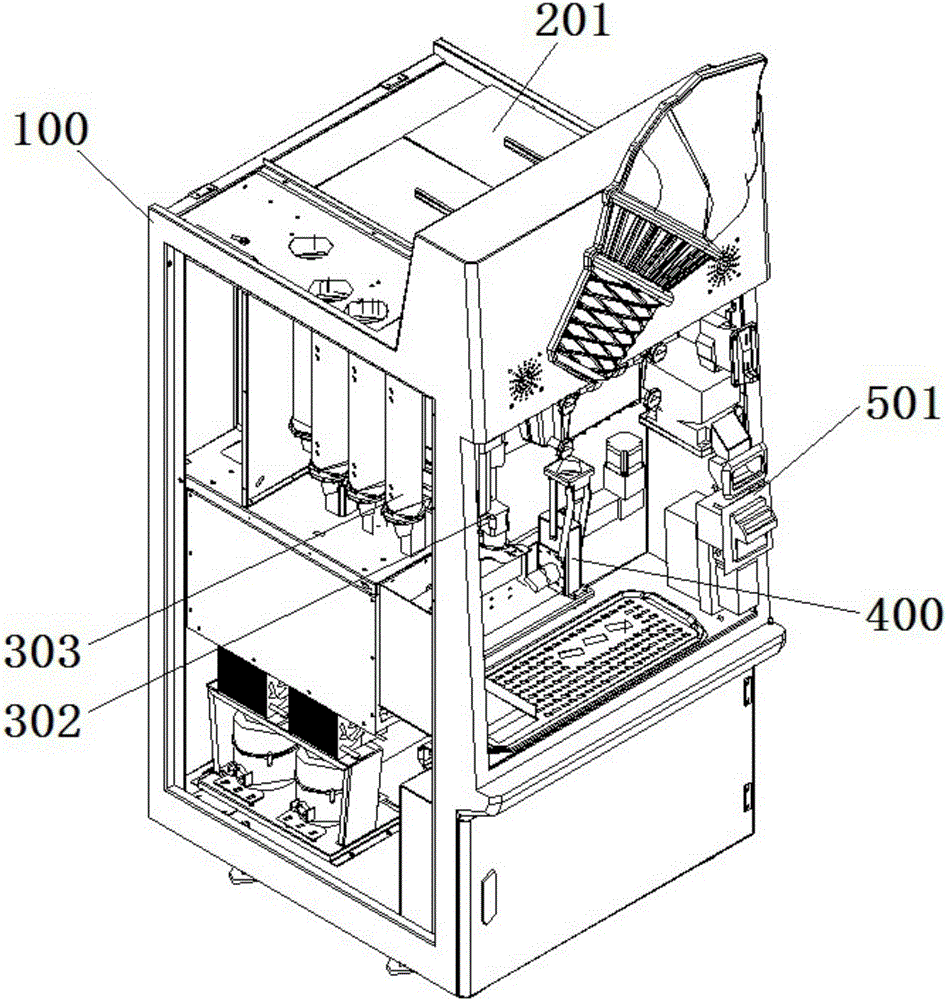
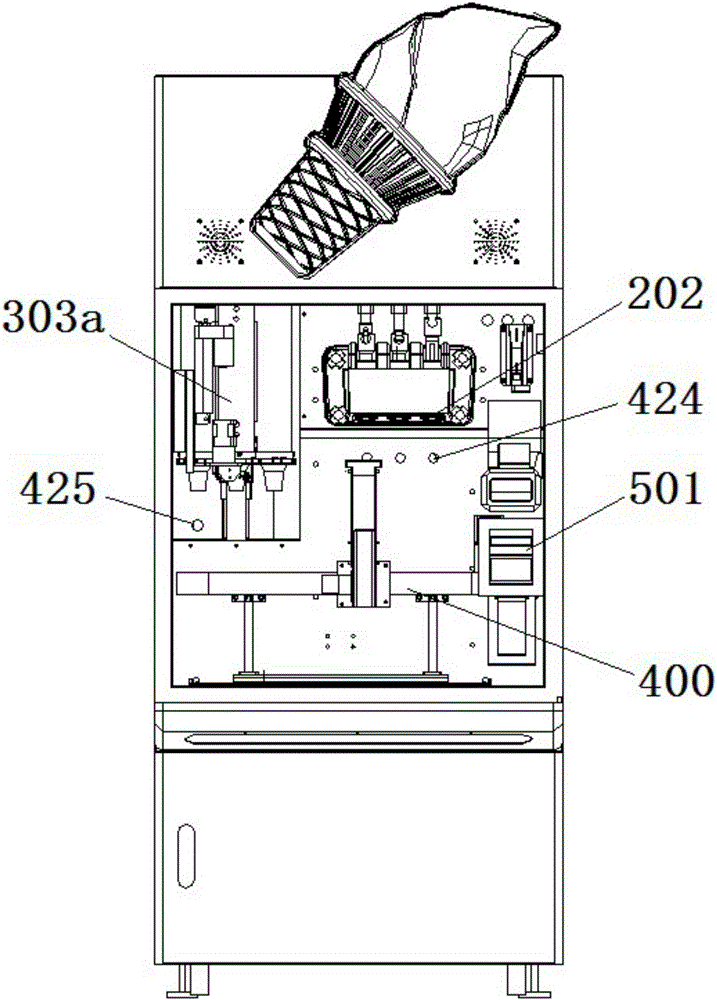
[0045] Such as Figure 1 to Figure 11 As shown, an embodiment of the present invention is an ice cream vending machine, which includes a body 100 with a delivery port 101, an ice cream making unit 200 mounted on the body 100, a cup supply unit 300, and a material receiving unit. The delivery unit 400, the operation unit 500 and the control unit 600; the receiving and delivery unit 400 is arranged between the ice cream making unit 200 and the cup supply unit 300; th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More