

Vehicle collision avoidance radar multi-target frequency matching method based on combined waveform of LFM triangular wave and constant frequency wave
A technology of anti-collision radar and combined waveforms, which is applied in the direction of radio wave reflection/re-radiation, radio wave measurement system, and utilization of re-radiation, etc., to achieve the effect of eliminating constant false alarm and better matching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0017] Embodiment 1: a kind of vehicle collision avoidance radar multi-target frequency matching method based on LFM triangular wave and constant frequency wave combined waveform, is characterized in that, comprises the following steps:
[0018] S1. Threshold detection is performed on the upper and lower sweep bands of the triangular wave and the constant frequency wave respectively. After the detection, the number of threshold points of the constant frequency wave is p, and the corresponding Doppler frequency is f respectively. c1 , f c2 ... f cp , the number of threshold points for frequency sweep on the triangular wave is m, and the corresponding difference frequencies are f up1 , f up2 ... f upm , the number of cross-threshold points for the down-sweep is n, and the corresponding difference frequencies are f down1 , f down2 ... f downn ;
[0019] S2. Set the p value as the minimum value of m and n;
[0020] S3. Combine the difference frequencies of the upper and lo...
Embodiment 2
[0028] The difference from Embodiment 1 is that: among the distance and speed information pairs of p targets, each target whose distance is less than or equal to the range resolution is considered as the same target, and finally obtains the real number of targets.
Embodiment 3
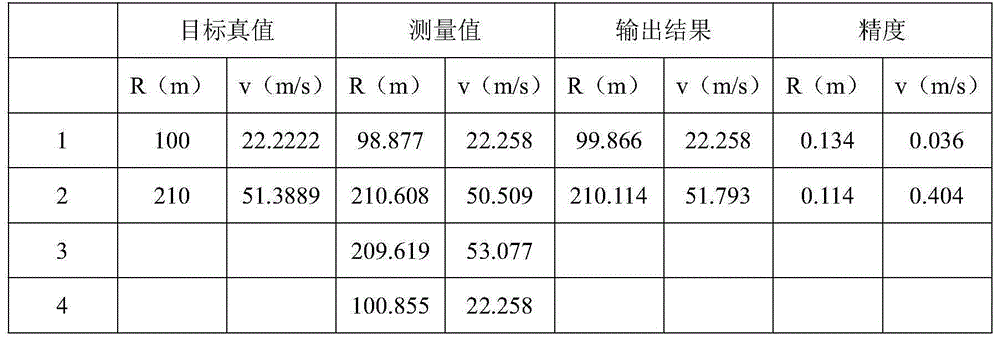
[0030]
[0031] The table is a kind of data obtained by using the method of Embodiment 1 according to the target true value and measured value. In the table, the output results and accuracy of the target's true value measurement value are the distance and speed of the target obtained by the radar multi-target detection, R is the distance, and v is the speed, which is the final difference frequency obtained through the upper and lower frequency sweep calculations above. calculated.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More