Shooting processing method for unmanned aerial vehicle
An unmanned aerial vehicle and camera processing technology, applied in the field of aerial photography, can solve problems such as disorientation, flying loss, easy flying loss of unmanned aerial vehicles, etc., and achieve high accuracy and improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
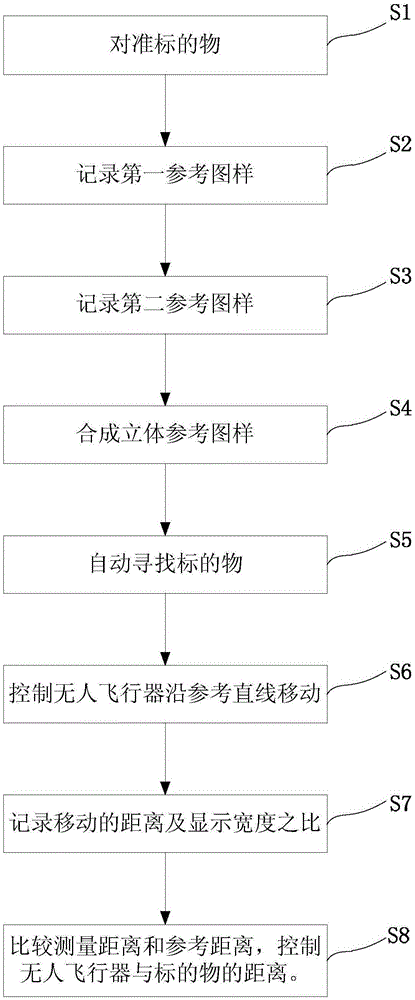
[0037] The camera processing method of the unmanned aerial vehicle disclosed by the present invention comprises the steps of:
[0038] Aim the UAV camera at the target;
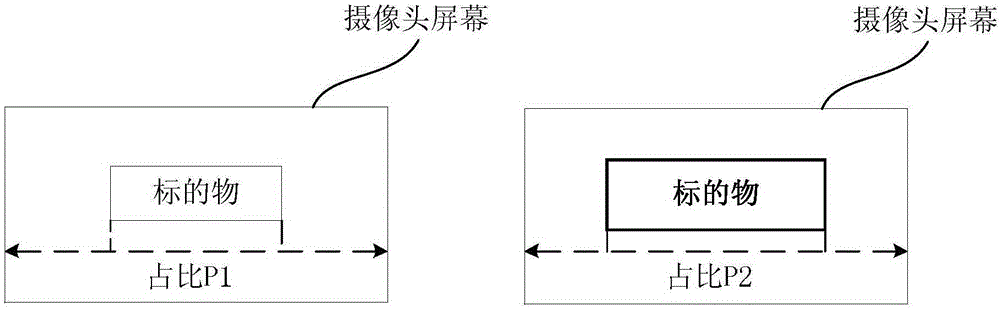
[0039] Focus on the target object for the first time, and record the image information of the focus frame as the first reference pattern;
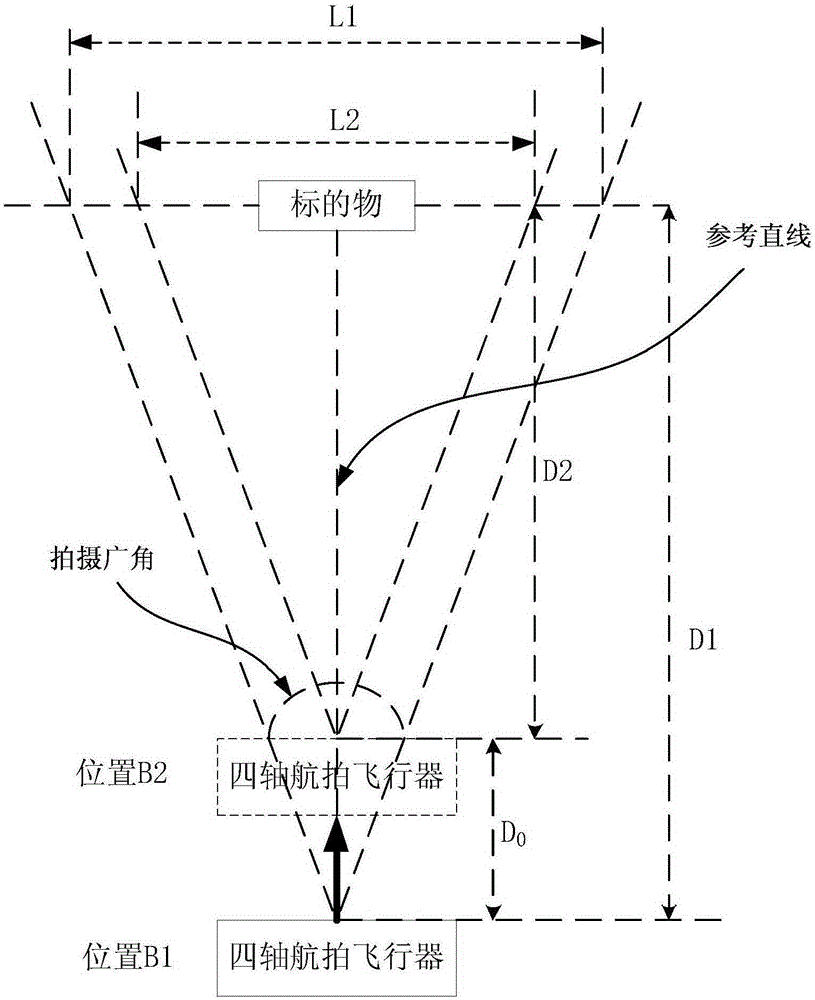
[0040] The unmanned aerial vehicle automatically moves the preset distance, focuses on the target object for the second time, and records the image information of the focusing frame as the second reference pattern;
[0041] synthesizing a stereoscopic reference pattern of the target object according to the first reference pattern and the second reference pattern;
[0042] When the unmanned aerial vehicle detects that the control signal is interrupted, the focus frame will automatically traverse the images in the entire viewfinder frame and compare them with the stereo reference pattern respectively. If no target object is found, the position of the unmanned aerial vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com