

Quick zero point calibration method for six-axis robot
A technology of a six-axis robot and a calibration method, which is applied in the calibration field of industrial robots, and can solve the problems of complex parts in the processing process and strict requirements on the assembly accuracy of the robot, so as to reduce the processing requirements, simplify the robot calibration work, and save calibration time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
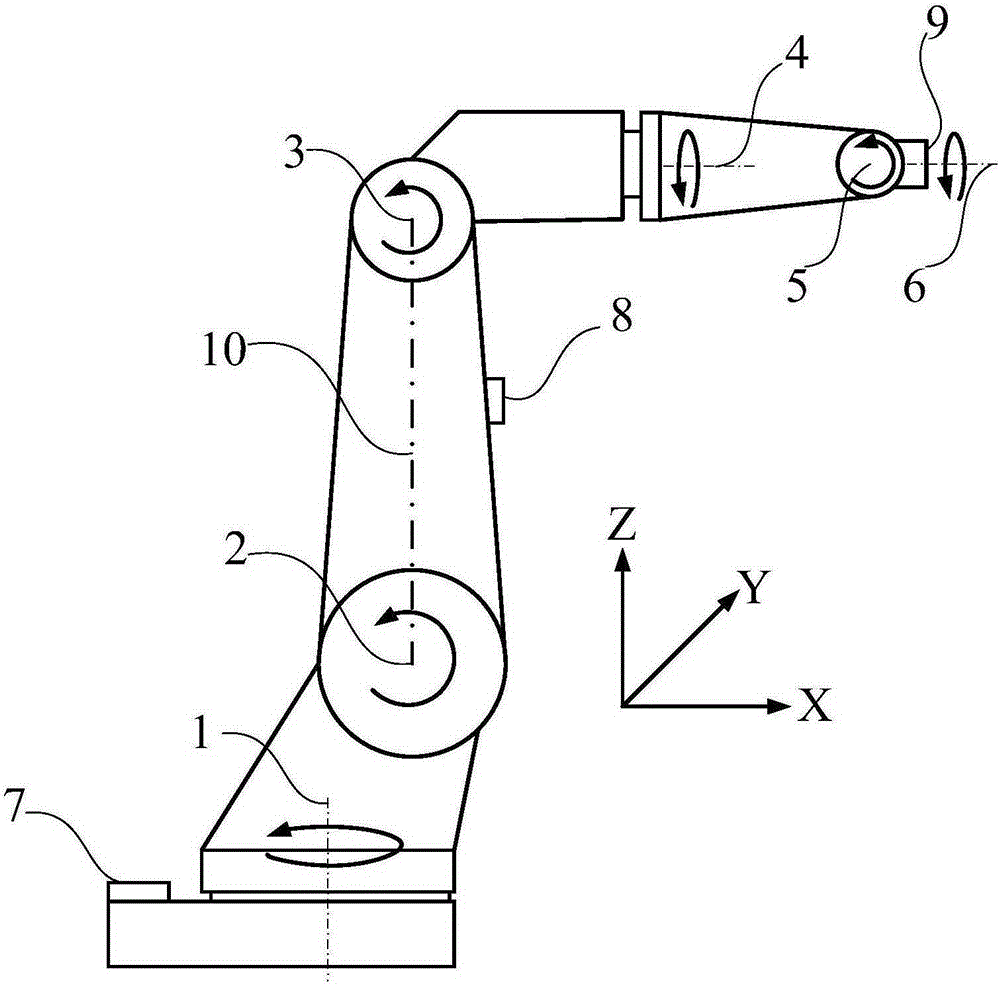
[0034] Such as figure 1 As shown, the six-axis robot of the present invention includes the first joint axis, the second joint axis, the third joint axis, the fourth joint axis, the fifth joint axis and the sixth joint axis connected by connecting rods sequentially from the base, The zero position is the initial position of the first joint axis, the second joint axis, the third joint axis, the fourth joint axis, the fifth joint axis and the sixth joint axis.
[0035] Such as figure 1 The rotation direction of the first joint axis, the second joint axis, the third joint axis, the fourth joint axis, the fifth joint axis and the sixth joint axis shown, that is, the first joint axis 1 is in the XY plane around the Z axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More