

Flexible Roberts mechanism based force sensor realizing two-stage force resolutions
A force sensor and resolution technology, applied in the field of force sensors with two-level force resolution, can solve the limited measurement range of force sensor accuracy and resolution, the inability to achieve two-level or even multi-level force resolution, and the reduction of sensor measurement range. and other problems, to achieve the effect of high measurement accuracy, simple structure and few components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings.
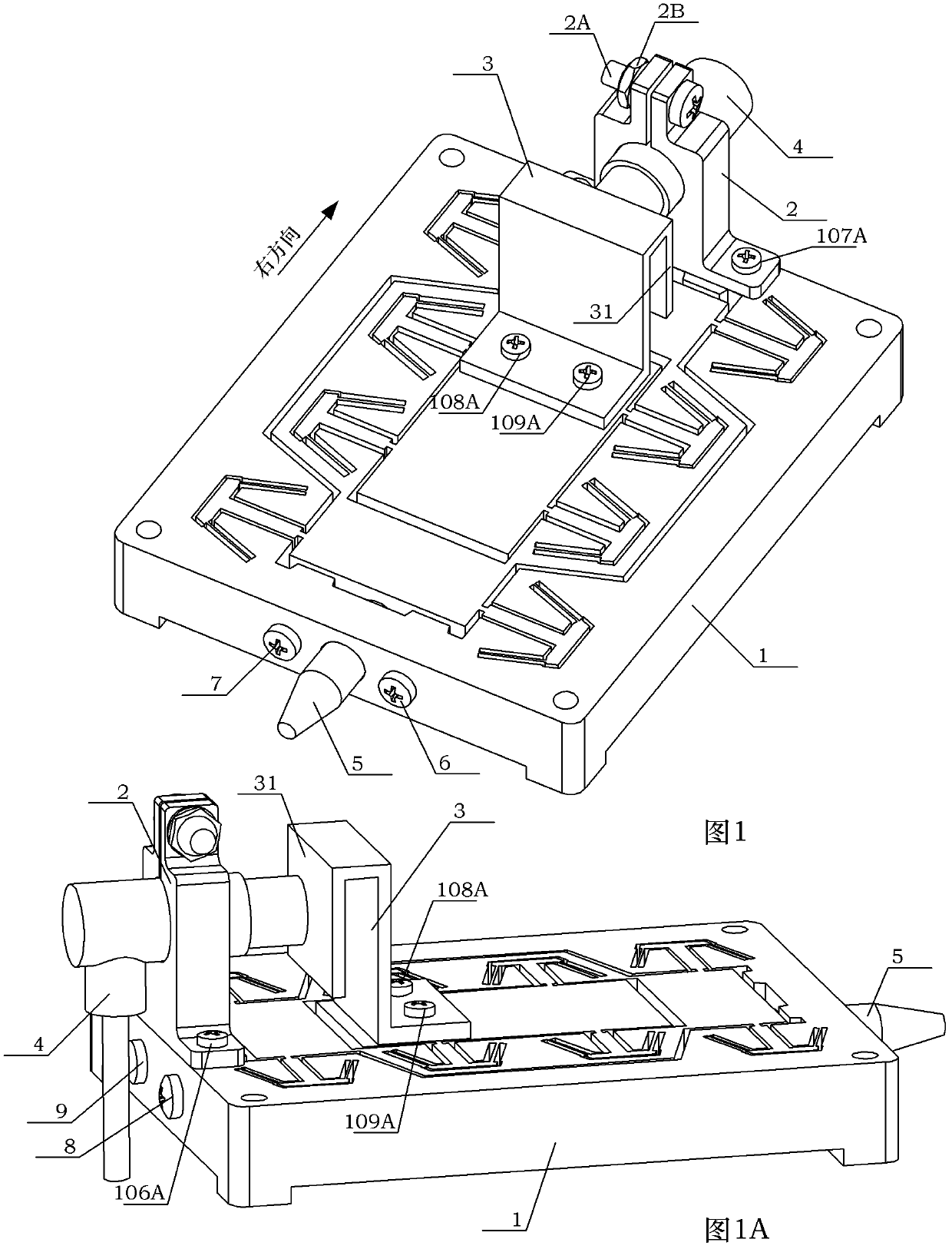
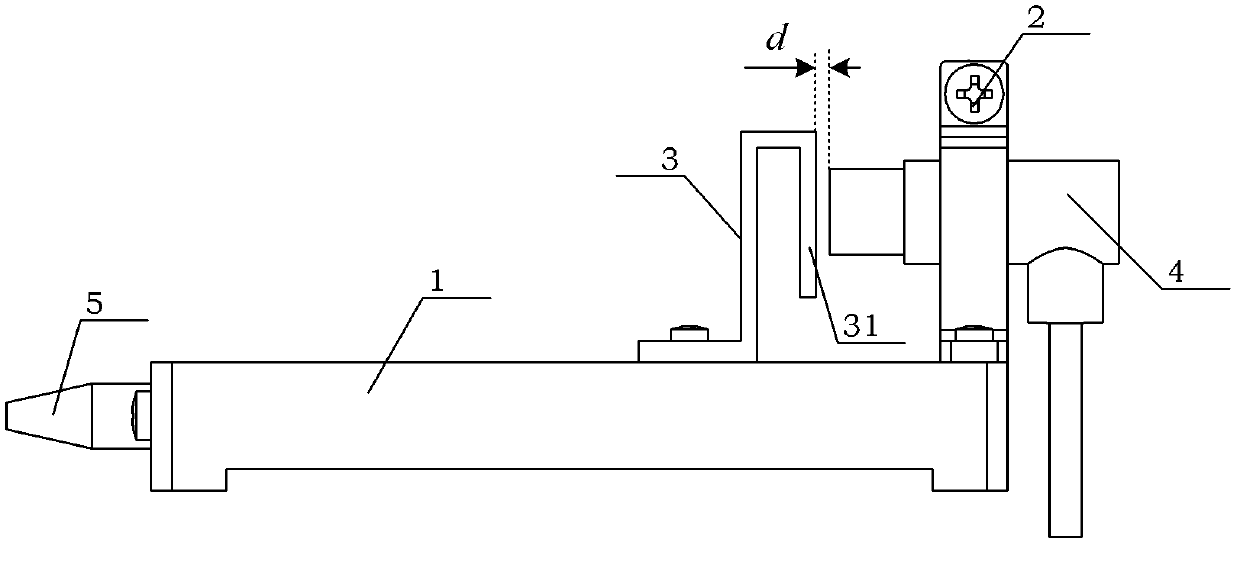
[0044] See Figure 1, Figure 1A, Figure 1B As shown, the present invention is a force sensor with two-stage force resolution based on a flexible Roberts mechanism. The force sensor includes a sensitive body 1 , a bracket 2 , a displacement detection part 3 , an eddy current displacement sensor 4 and a probe 5 .
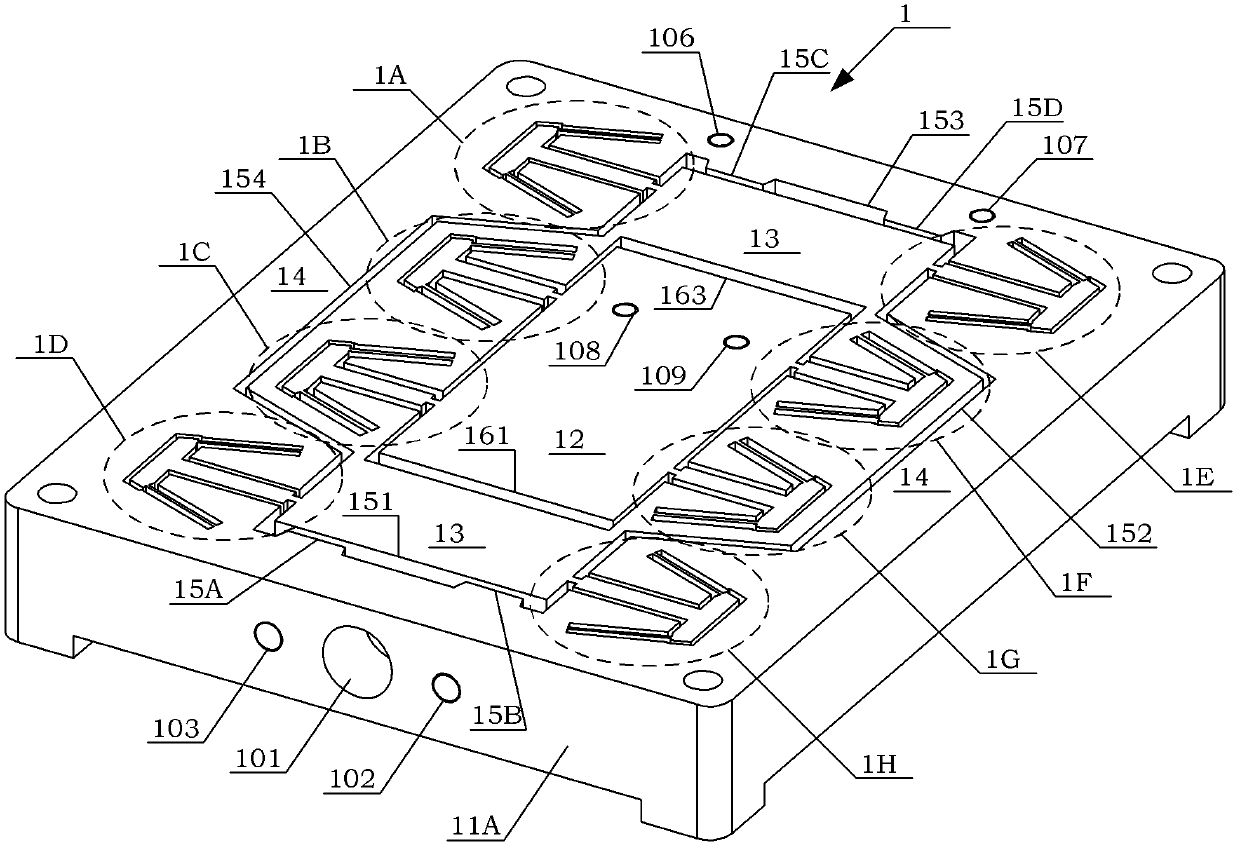
[0045] The bracket 2 is installed on the third platform 14 of the sensitive body 1, that is, the bracket 2 is fixedly mounted on the third platform 14 of the sensitive body 1 through the cooperation of the B screw 106A and the E threaded hole 106, and the cooperation of the C screw 107A and the F threaded hole 107. Three platforms 14 on one side.
[0046] The displacement detection part 3 is installed on the first platform 12 of the sensitive body 1, that is, through the cooperation of the D screw 108A and the G threaded hole 108, and the cooperation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More