

Robotic hybrid system application frame based on multi-core processor architecture
A multi-core processor and hybrid system technology, applied in the field of robotics, can solve problems such as single function, less system application resources, and limited applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The details involved in the technical solution of the present invention will be described in detail below with examples in conjunction with the accompanying drawings. It should be noted that the described examples are only intended to facilitate the understanding of the present invention, and have no limiting effect on it.
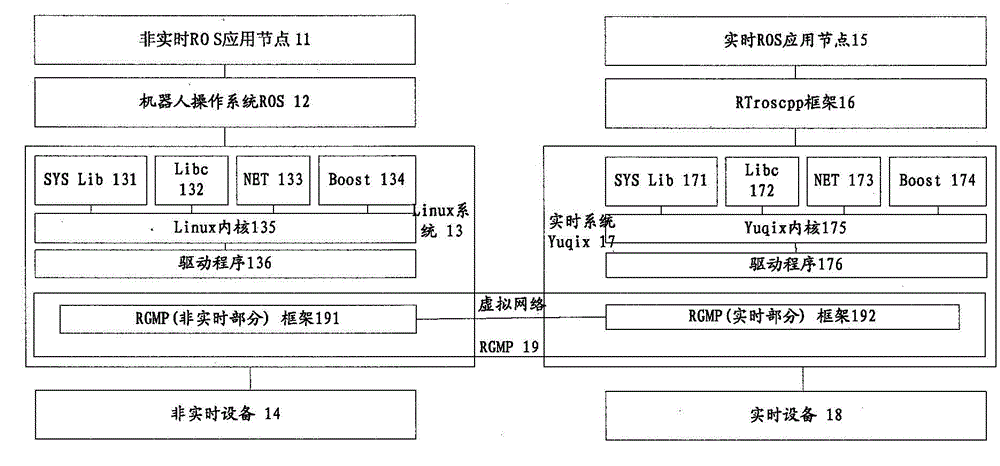
[0038] Although this application is mainly described in conjunction with the Linux non-real-time operating system and the Yuqix real-time operating system to the description of the specific embodiments, the non-real-time operating system and the real-time operating system that can be applied to the present invention are not limited to the Linux non-real-time operating system and Yuqix RTOS, but can be applied to any other non-RTOS and / or RTOS.
[0039] see figure 1 Shown is a general composition structure diagram of a robot hybrid system application framework based on a multi-core processor architecture. The robot hybrid system application framework...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More