

Coordination control method for mechanical arm and operation platform in final stage of grabbing
An operating platform and coordinated control technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing the difficulty of capturing targets by tools at the end of the manipulator, and the inability of hand-eye binocular cameras to continue to provide measurement data. Capture success rate, simple system effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
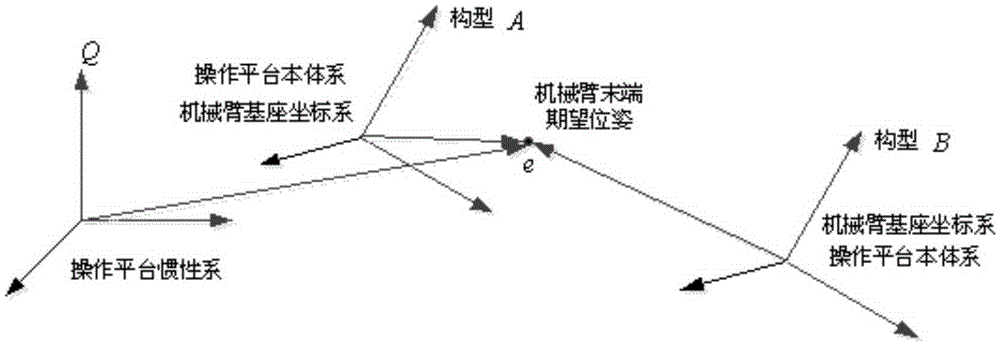
[0020] Based on the built space non-cooperative target capture operation ground test system, the coordinated control algorithm designed by the present invention is verified. The mechanical arm adopts a series-parallel hybrid structure, and the terminal measurement equipment is a binocular hand-eye camera. The camera measures the end of the mechanical arm and the graspable The relative expected pose of the captured part is calculated to obtain the joint configuration of the manipulator corresponding to the expected pose, and the end of the manipulator is controlled to move to the target captureable part to complete the capture of the star arrow docking ring.
[0021] The present invention provides a coordinated control method for a robot arm and an operating platform at the final stage of capture, the steps of which are as follows:
[0022] 1) Before entering the final stage of capture, the last frame of valid data of the captureable part of the target is measured by the hand-ey...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More