

Swinging arm type unmanned four-wheel driving platform
A swing arm and platform technology, applied in the field of unmanned vehicles, can solve the problems of not having to climb stairs, large energy consumption, heavy weight, etc., and achieve the effect of overcoming poor terrain adaptability, strong passing performance, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
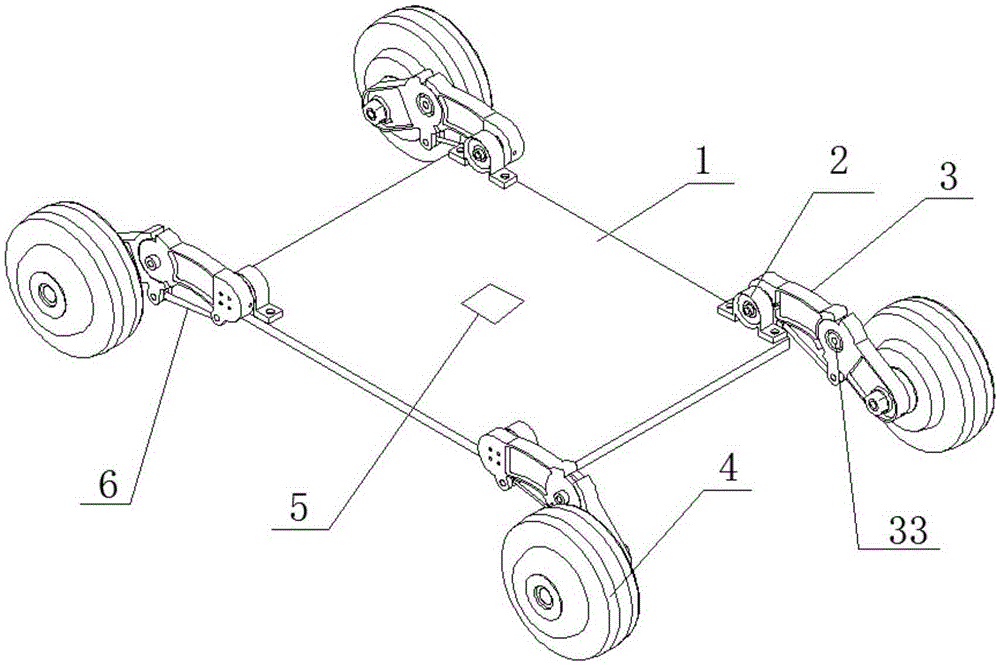
[0034] Please refer to figure 1 , a structural schematic diagram of an electric vehicle swing arm type unmanned four-wheel drive platform disclosed by the present invention;
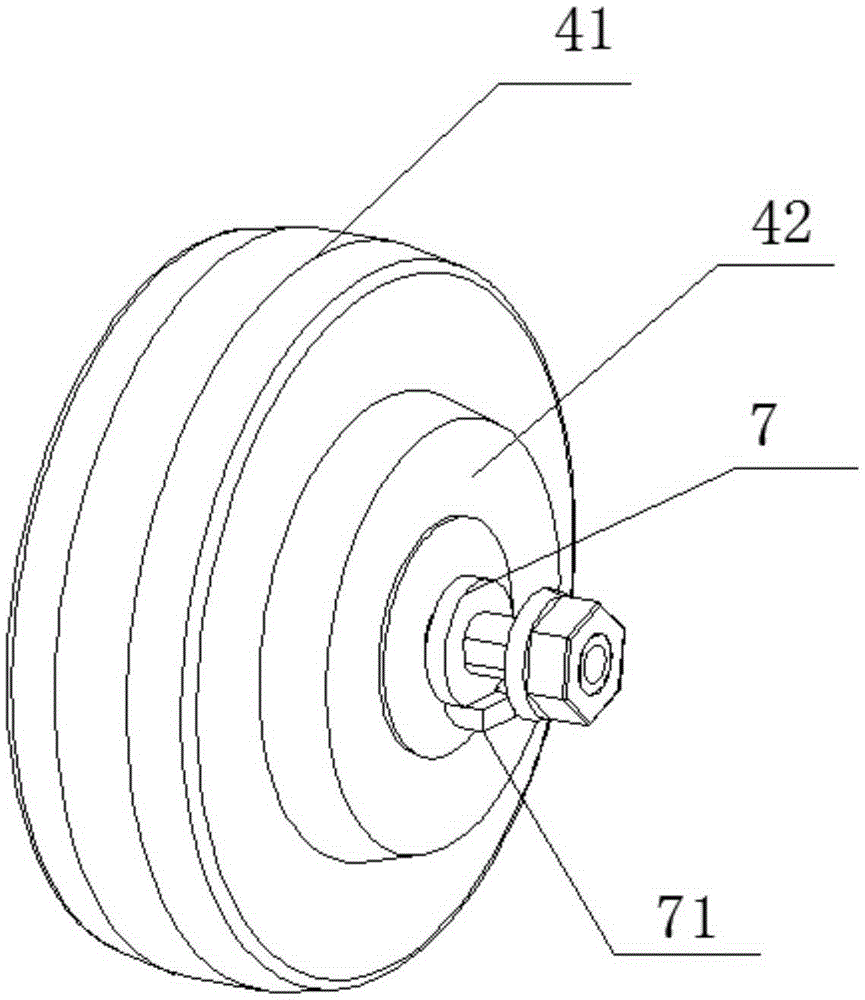
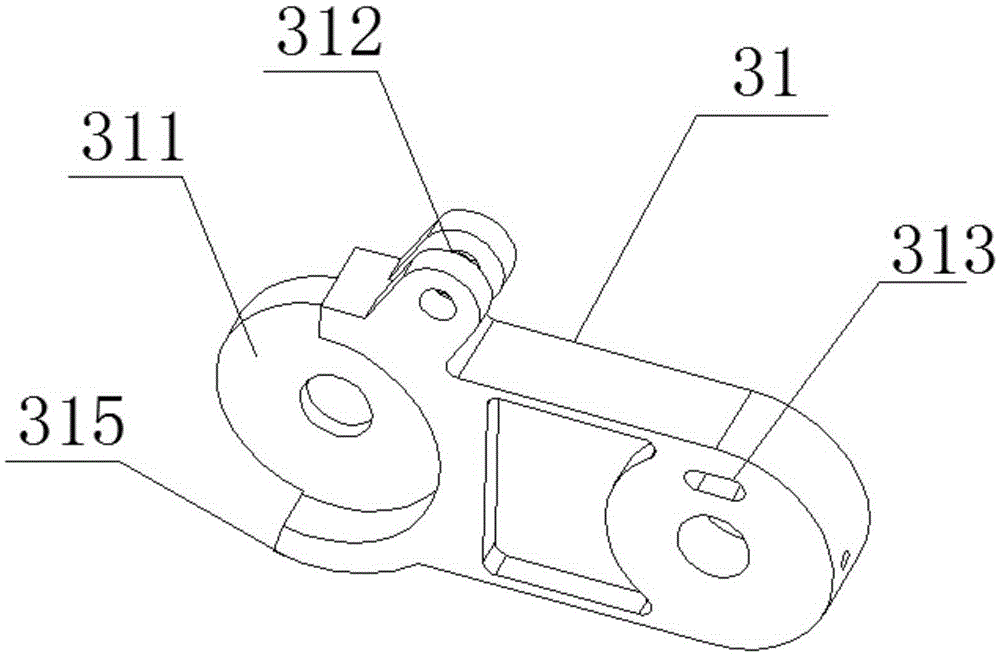
[0035] A swing arm type unmanned four-wheel drive platform, comprising a car body 1, a swing arm drive mechanism 2, a swing arm mechanism 3, a wheel mechanism 4 and a controller 5;
[0036] The shape of the vehicle body 1 can be other shapes such as rectangle, trapezoid, circle, etc. In this embodiment, a rectangular vehicle body 1 is taken as an example for illustration.
[0037] The four corners of the vehicle body 1 are respectively equipped with a swing arm drive mechanism 2, the swing arm drive mechanism 2 is respectively connected with the swing arm mechanism 3, the wheel mechanism 4 is connected with the bottom of the swing arm mechanism 3, and the controller 5 is installed on the vehicle body 1, the controller 5 respectively controls the operation of the swing arm drive mechanism 2 and the wheel...
Embodiment 2
[0057] Please refer to figure 1 , a schematic diagram of an electric vehicle swing arm type unmanned four-wheel drive platform disclosed by the present invention;
[0058] A swing arm type unmanned four-wheel drive platform, comprising a car body 1, a swing arm drive mechanism 2, a swing arm mechanism 3, a wheel mechanism 4 and a controller 5;
[0059] The shape of the vehicle body 1 can be other shapes such as rectangle, trapezoid, circle, etc. In this embodiment, a rectangular vehicle body 1 is taken as an example for illustration.
[0060] The four corners of the vehicle body 1 are respectively equipped with a swing arm drive mechanism 2, the swing arm drive mechanism 2 is respectively connected with the swing arm mechanism 3, the wheel mechanism 4 is connected with the bottom of the swing arm mechanism 3, and the controller 5 is installed on the vehicle body 1, the controller 5 respectively controls the operation of the swing arm drive mechanism 2 and the wheel mechanism ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More