

Improvement on mobile robot path planning method based on ant colony algorithm
A mobile robot and path planning technology, applied in the direction of instruments, calculations, calculation models, etc., can solve the problem of slow convergence speed of the ant colony algorithm, and achieve the effect of improving the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The present invention will be described in detail below according to the accompanying drawings, which is a preferred embodiment among various implementations of the present invention.
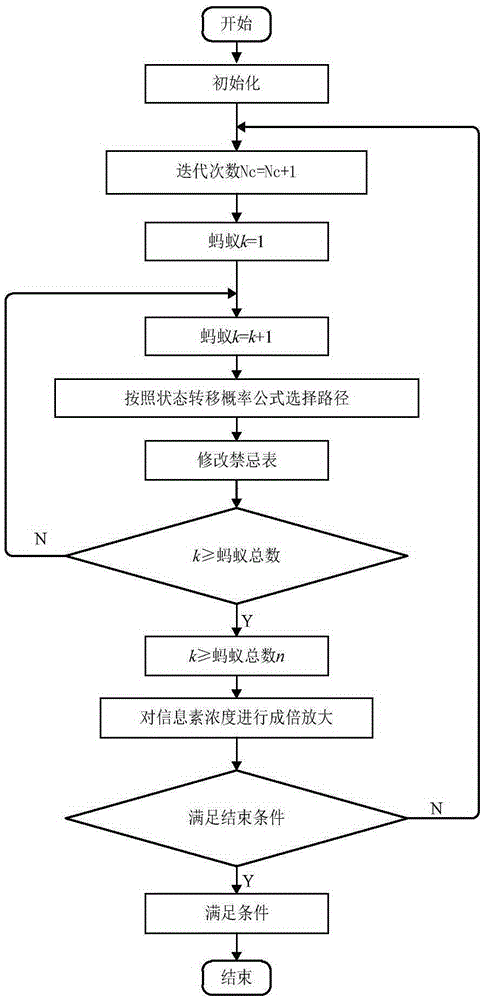
[0024] In a preferred embodiment, a method for path planning of a mobile robot includes the following steps: looking for the shortest path in the environment; when the robot detects that it will collide with a dynamic obstacle in the environment while advancing, it will determine whether the path is far away from the dynamic obstacle on the shortest path. The object-safe grid is the local target point; determine the range of movement of the dynamic obstacle; the robot advances along the grid with high pheromone concentration; obtain an optimal path that avoids the dynamic obstacle and passes through the specified point. The ant colony algorithm adopts the following algorithm steps: the parameters are optimized by the particle swarm algorithm to find a set of optimal solutions, and the gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More