

Autonomous obstacle avoidance method, device and system
A technology of obstacles and obstacle information, applied in control/regulation systems, transportation and packaging, two-dimensional position/channel control, etc., can solve problems such as easy collision with obstacles, long braking distance, and reduced safety performance. Achieve the effect of reducing collision, avoiding collision, improving robustness and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
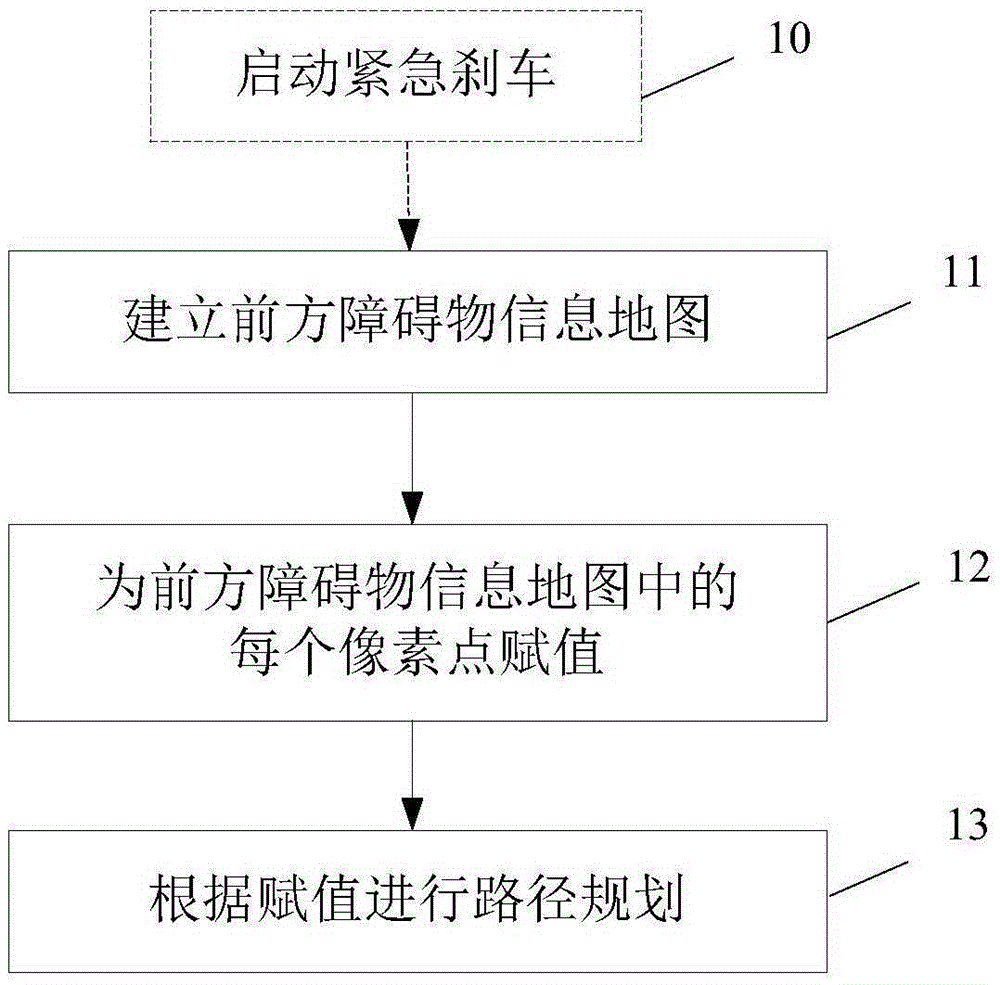
[0062] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and preferred embodiments. It should be understood that the following examples are only used to explain and illustrate the present invention, but are not intended to limit the technical solution of the present invention.
[0063] At present, in the field of intelligent mobile technology, although they are all equipped with a braking system, when they brake in a fast-moving state, there will be a long braking distance and the risk of bumping into obstacles. Take the self-balancing car (also called somatosensory car, thinking car, and camera car) as an example. The self-balancing car mainly uses the gyroscope and acceleration sensor inside the car body to detect changes in the attitude of the car body, and uses the servo control system to accurately drive the motor to make corresponding adjustments to maintain the dynamic balance of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More