

Auto Parts Recognition Method Based on Spatial Shape Context Features
A space context and auto parts technology, applied in computer parts, character and pattern recognition, image analysis, etc., can solve problems such as matching errors, misleading auto repair workers, and inaccurate recognition, so as to improve operating efficiency and accuracy , the effect of saving time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
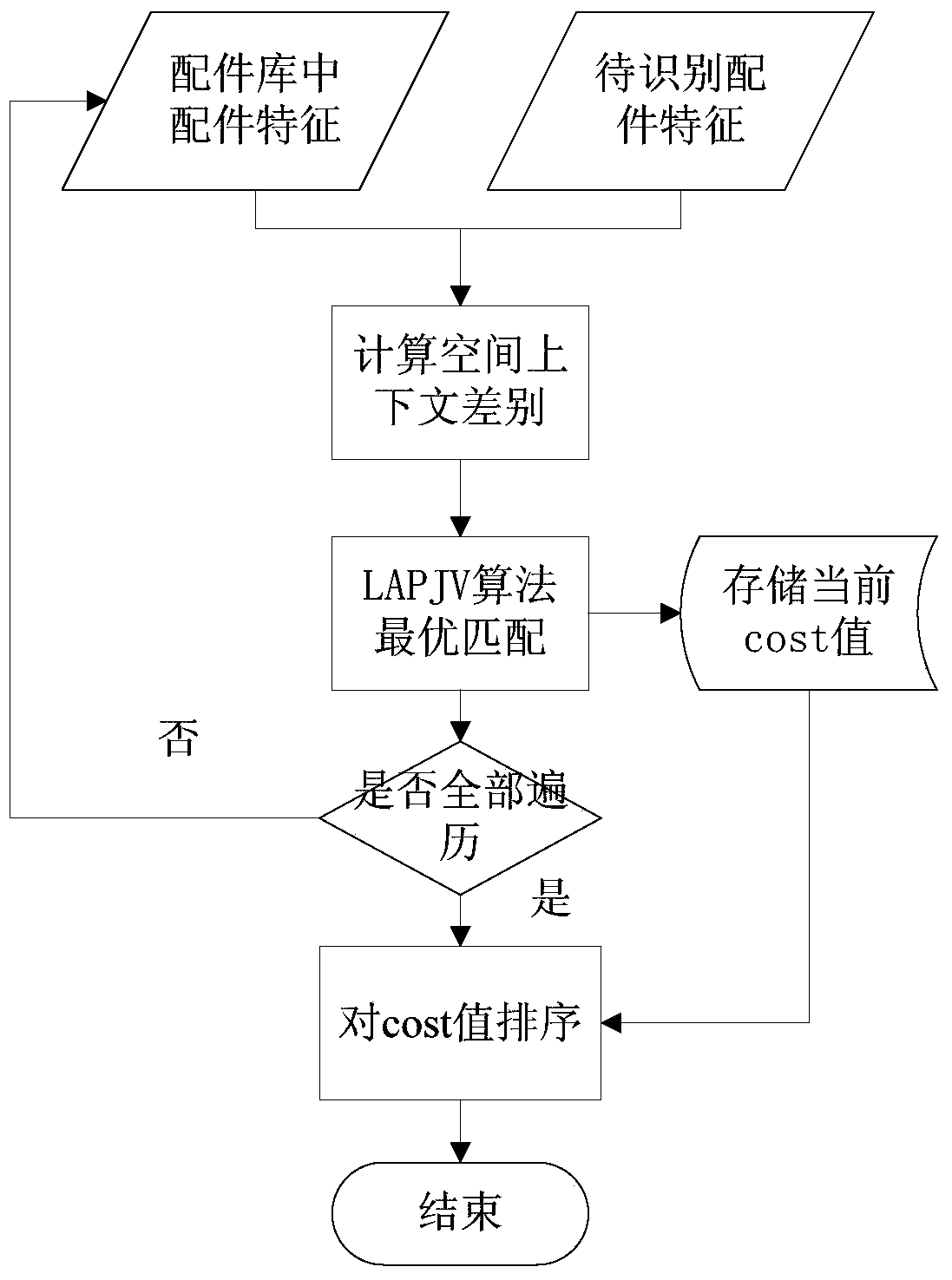
[0035] The auto parts recognition method based on spatial shape context features is characterized in that it has the following steps: S1. constructing an offline auto parts feature library; S2. extracting the features of the auto parts to be identified online, and comparing them with the off-line auto parts feature library Feature matching and recognition of auto parts.
Embodiment 2
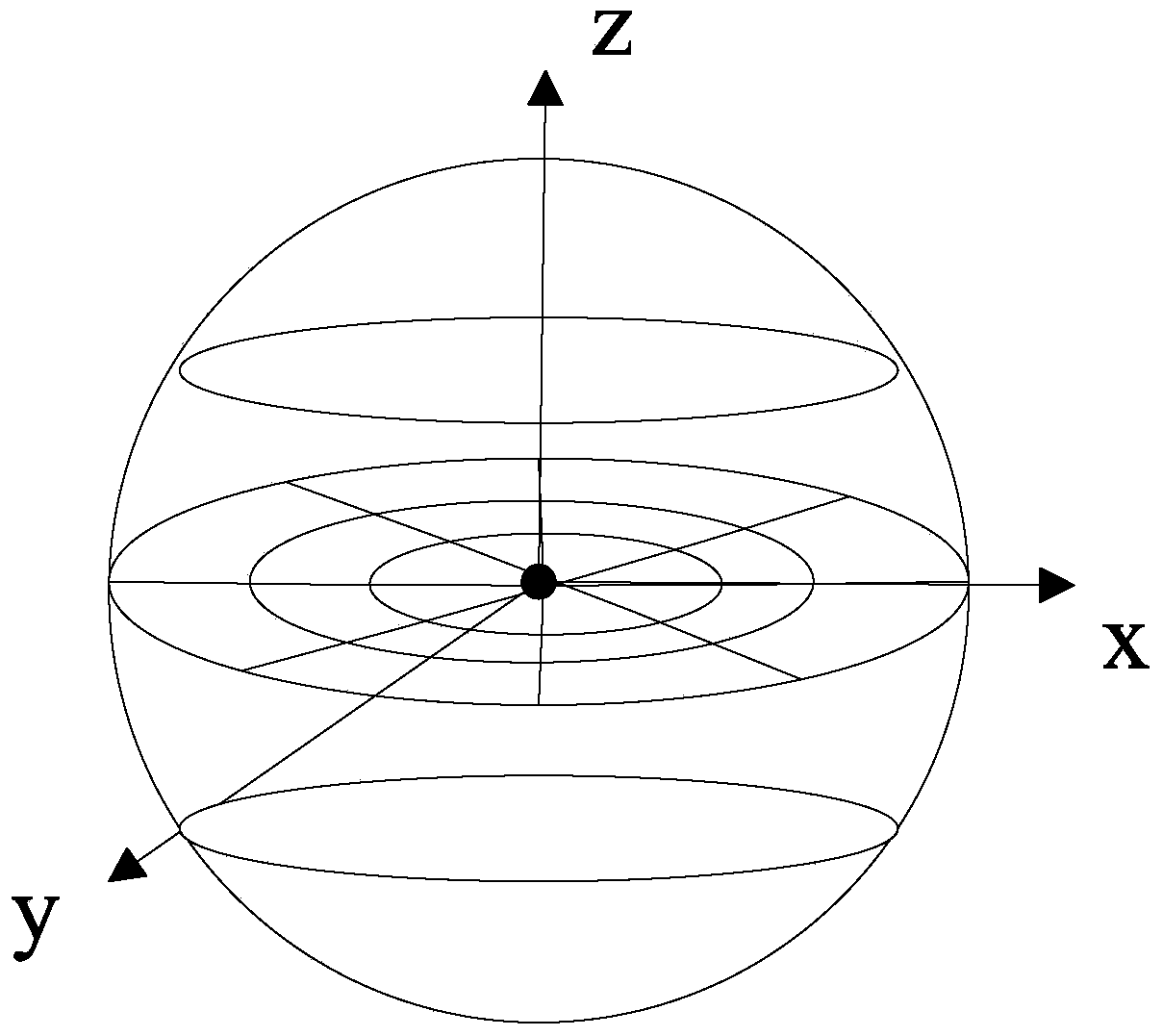
[0037] It has the same technical solution as in Embodiment 1, and more specifically: matching and recognition are based on spatial shape context features, and the spatial context features refer to extracting feature points of three-dimensional space car parts to be identified, and dividing the spatial regions to form The relative positional relationship of the feature points is used as the feature of the auto part.
Embodiment 3
[0039] Have the technical scheme identical with embodiment 1 or 2, more specifically: described step S1. The concrete method of constructing off-line auto parts feature library is:
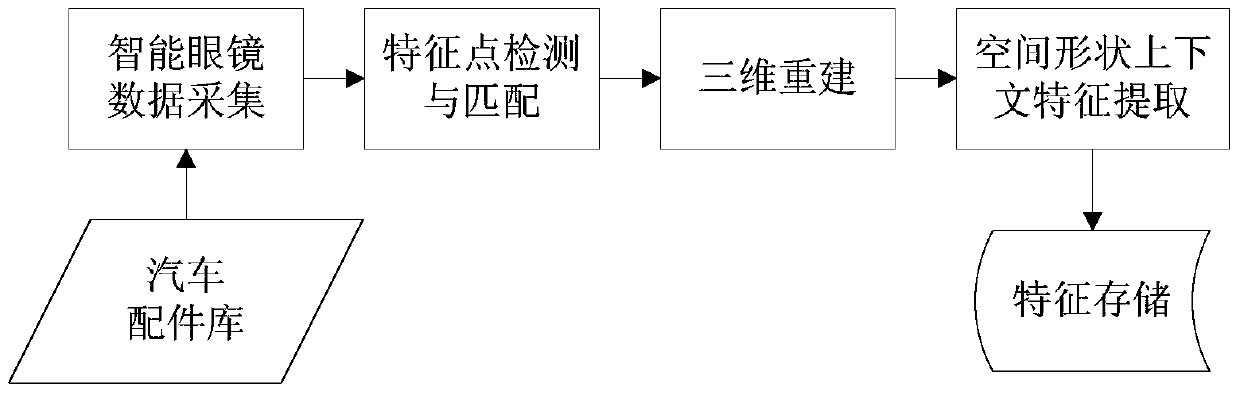
[0040] S1.1 Take out an auto part from the auto parts library, and shoot it from multiple angles. The captured images have overlapping parts. After the shooting, the image data is sent to the cloud server for further processing;
[0041] S1.2. Extract the SIFT feature points of each car part image collected, match the feature points with the next image, and use RANSAC to remove the mismatch points;
[0042] S1.3. Reconstruct the feature points extracted according to S1.2 according to the three-dimensional reconstruction principle of sequence images to obtain a three-dimensional point cloud, and map the n two-dimensional feature points extracted in S1.2 to a three-dimensional space to form a three-dimensional space Feature point set P{p 1 ,p 2 …p n}.
[0043] S1.4. Through the spatial shape con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More