

Method for controlling intelligent mobile service robot based on head posture recognition
A mobile service, head posture technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve problems such as interference of light conditions and poor user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
[0034] Aspects of the invention are described in this disclosure with reference to the accompanying drawings, which show a number of illustrated embodiments. Embodiments of the present disclosure are not necessarily intended to include all aspects of the invention. It should be appreciated that the various concepts and embodiments described above, as well as those described in more detail below, can be implemented in any of numerous ways, since the concepts and embodiments disclosed herein are not limited to any implementation. In addition, some aspects of the present disclosure may be used alone or in any suitable combination with other aspects of the present disclosure.
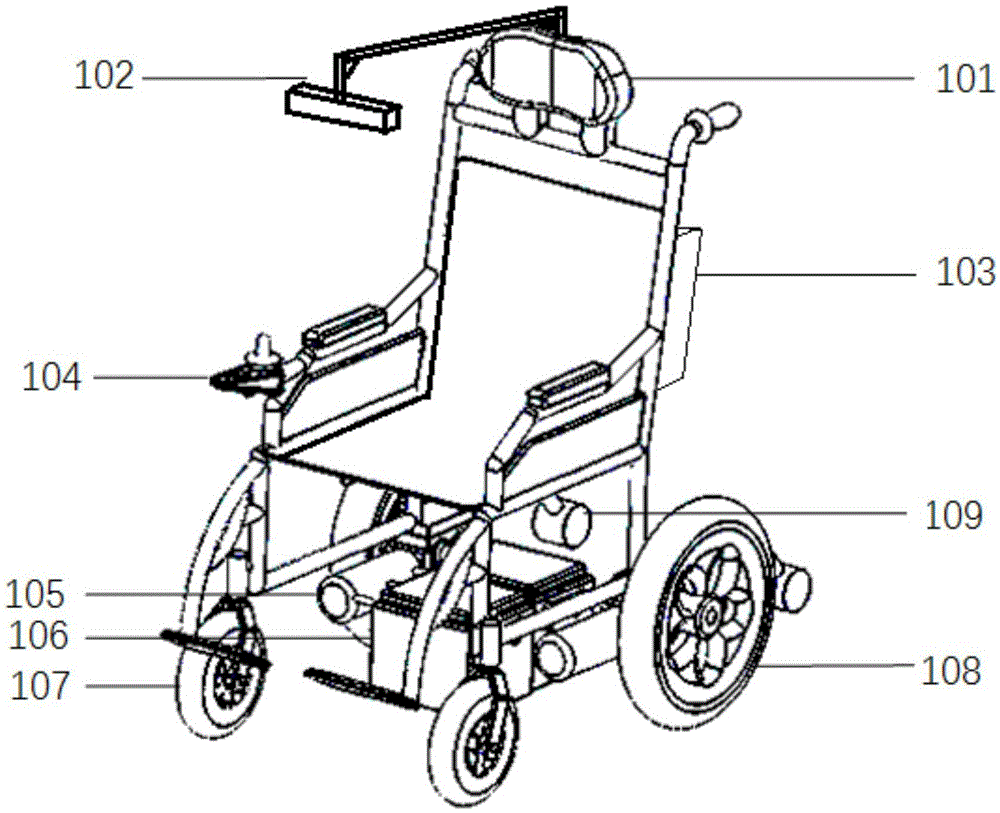
[0035] figure 1 It is a structural diagram of an intelligent mobile service robot. The intelligent mobile service robot 100...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More