

Caterpillar-drive walking assisting exoskeleton
A crawler drive and exoskeleton technology, which is applied in the direction of equipment to help people walk, physical therapy, etc., can solve the problem of lack of functional parts in the foot and ankle joints, and achieve the effect of avoiding the lack of rotation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to describe the technical content, structural features, goals and effects of the present invention in detail, the following examples are given to describe the embodiments in conjunction with the accompanying drawings.
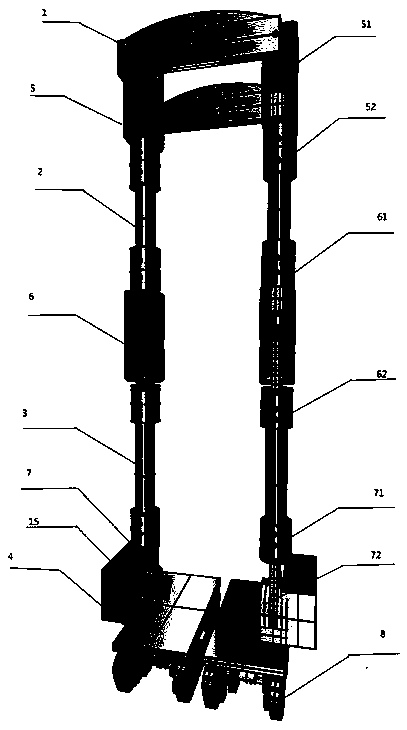
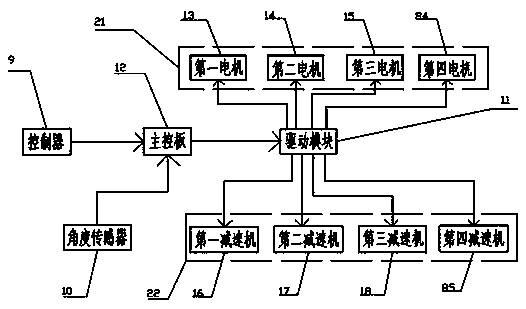
[0026] refer to figure 1 with figure 2 As shown, a crawler-driven walking aid exoskeleton of the present invention includes a support assembly, a power assembly and a controller 9, wherein the support assembly includes a waist support, a thigh support, a calf support and a plantar support, and the waist support and the thigh support The hip joint 5 is connected between them, the thigh support and the calf support are connected through the knee joint 6, and the calf support and the sole support are connected through the ankle joint 7; the power assembly includes a reducer 22 and a motor 21, and the controller 9 controls the reducer 22 and motor 21.
[0027] Continue to refer to figure 1 and combine Figure 3 to Figure 8 As shown, the hip joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More