

Fluid-driven multidimensional adaptive robotic hand device
A robotic hand, fluid-driven technology, used in manipulators, program-controlled manipulators, chucks, etc., can solve the problems of difficult grasping, high energy consumption, and loud noise of the gripper, and achieve high grasping stability and grasping range. Large, simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
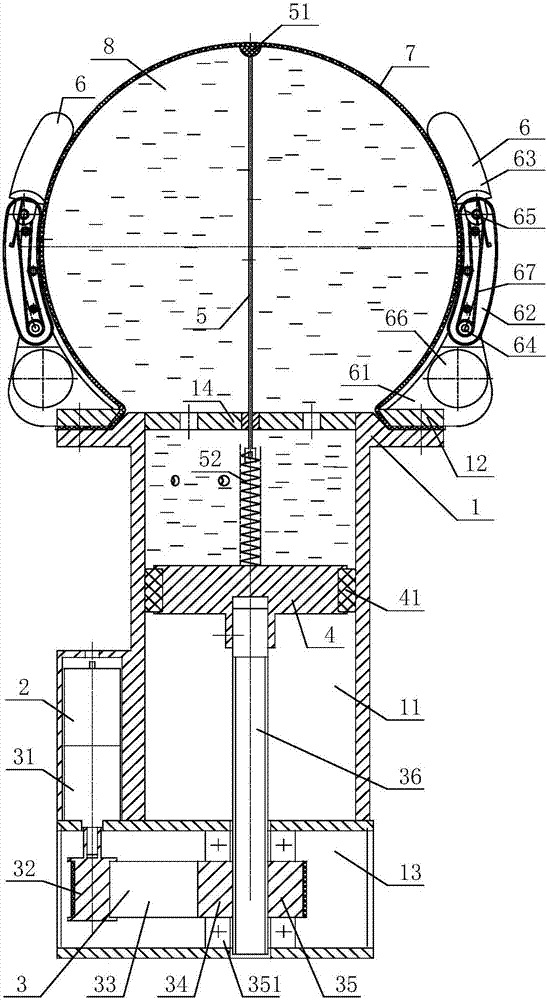
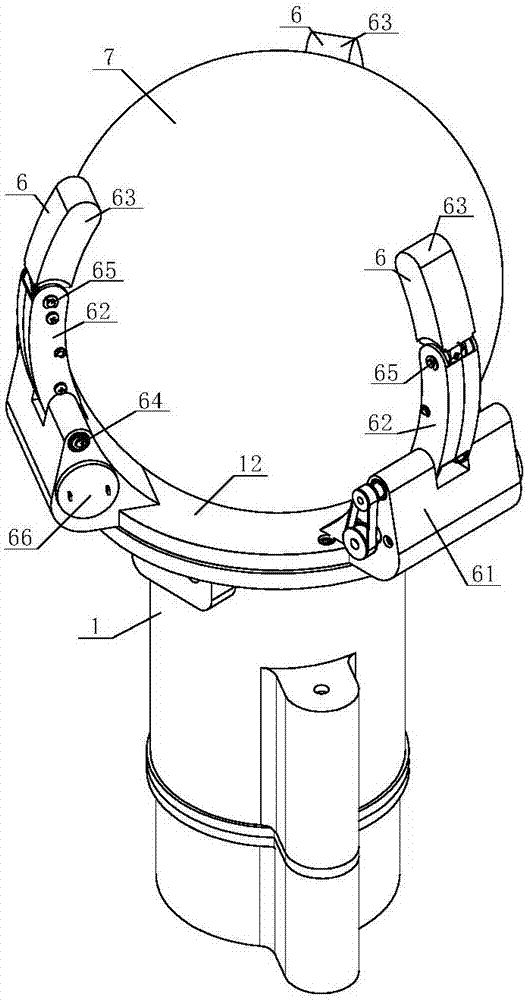
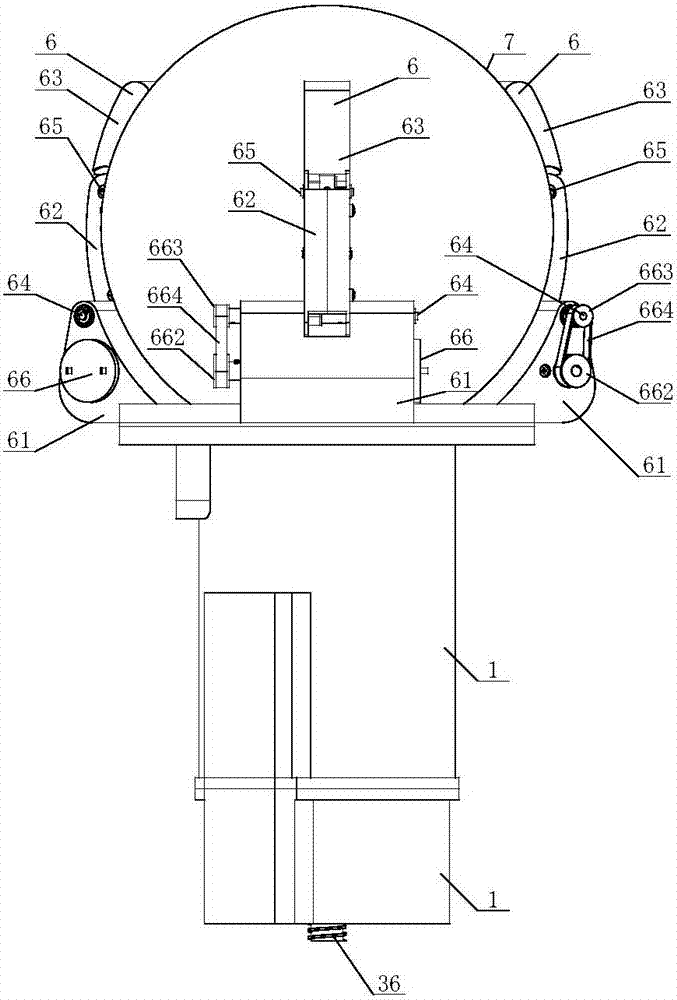
[0036] The first embodiment of the fluid-driven multi-dimensional self-adaptive robotic hand device designed by the present invention, such as figure 1 As shown, it includes a base 1, a first driver 2, a transmission mechanism 3, a piston 4, a membrane member 5, a first spring member 52, a membrane skin 7 and a fluid 8; the base 1 includes a base sleeve 11; The first driver 2 is fixedly connected to the base 1, the output shaft of the first driver 2 is connected to the input end of the transmission mechanism 3, the output end of the transmission mechanism 3 is connected to the piston 4, and the piston 4 is slidingly embedded In the base sleeve 11; the two ends of the first spring member 52 are respectively connected to one end of the film pulling member 5 and the piston 4; the ot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More