

Rope driven magnetorheological fluid particle-reinforced universal grasping device
A magneto-rheological fluid and particle-enhanced technology, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of cumbersome sensing and control, high cost, and high noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
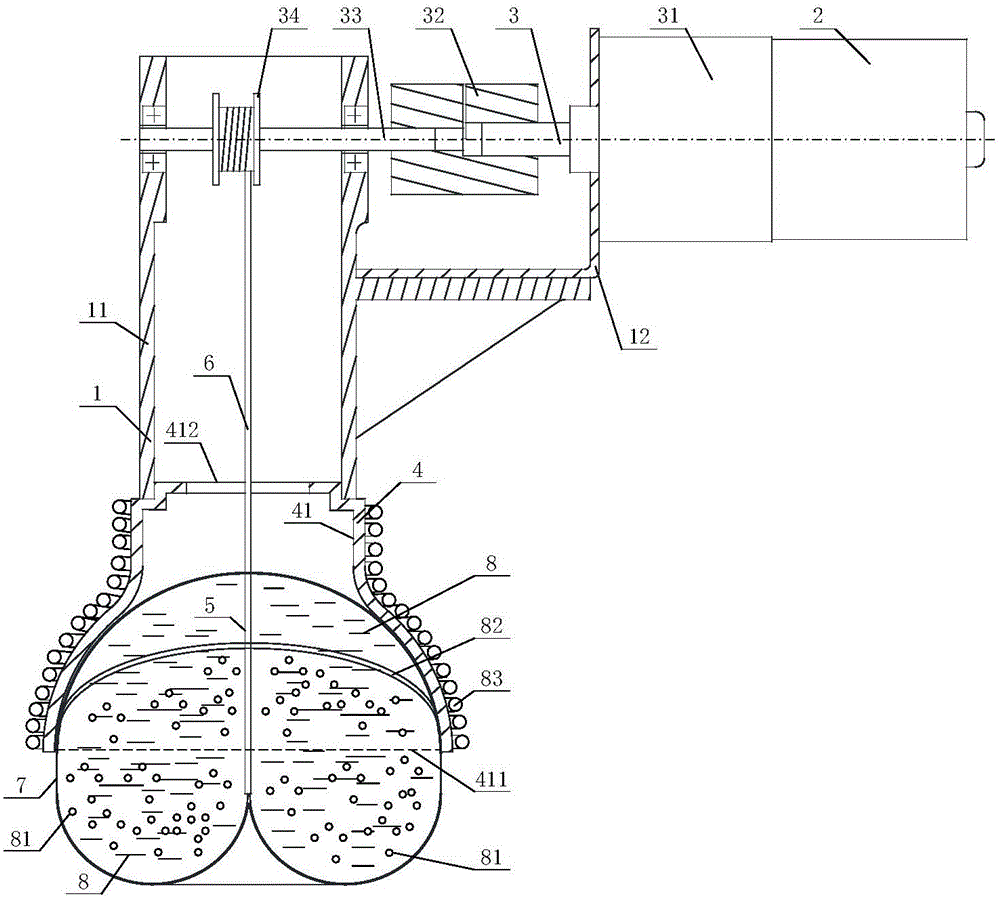
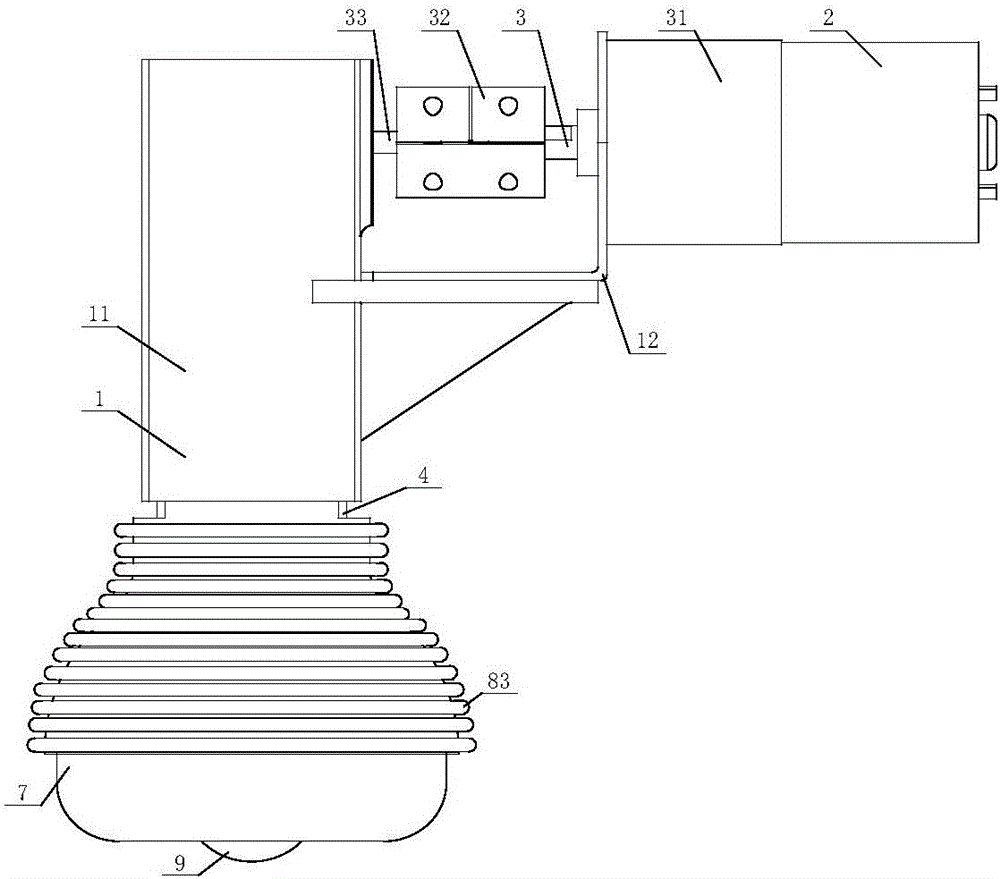
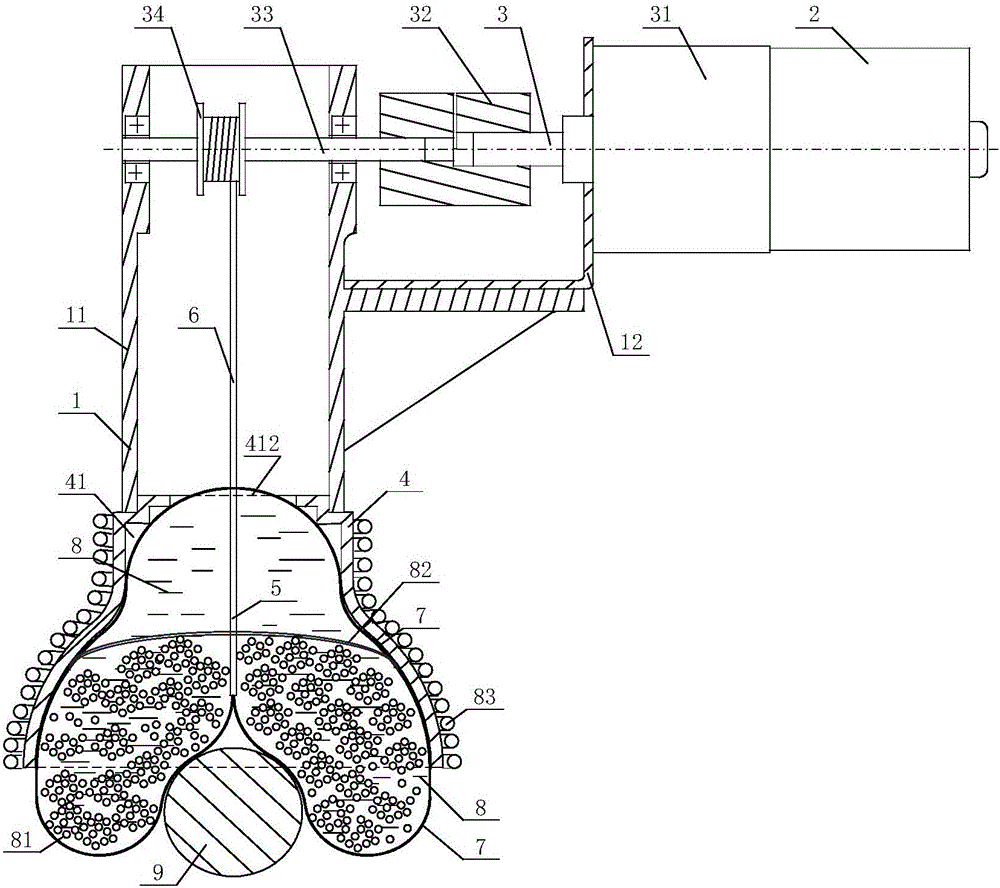
[0030] An embodiment of the rope-driven magnetorheological fluid particle reinforced universal gripping device designed by the present invention, such as figure 1As shown, it includes a base 1, a driver 2, a transmission mechanism 3, a channel member 4, a first film member 5, a second film member 6, a granular material 81, a filter layer 82, an electromagnet 83, an elastic film 7 and a magnetic rheological fluid 8; the channel member 4 is fixed to the base 1; the driver 2 is fixed to the base 1, the output shaft of the driver 2 is connected to the input end of the transmission mechanism 3, and the transmission mechanism 3 The output end is connected to the upper end of the second stretched film member 6, the lower end of the second stretched film member 6, the upper end of the el...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More