

Porous double-layered fluid self-adaptive robot hand device
A robotic hand and self-adaptive technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of grasping failure, inability to grasp, limited suction of suction cups, etc., achieving high grasping stability, large grasping range, Control easy effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
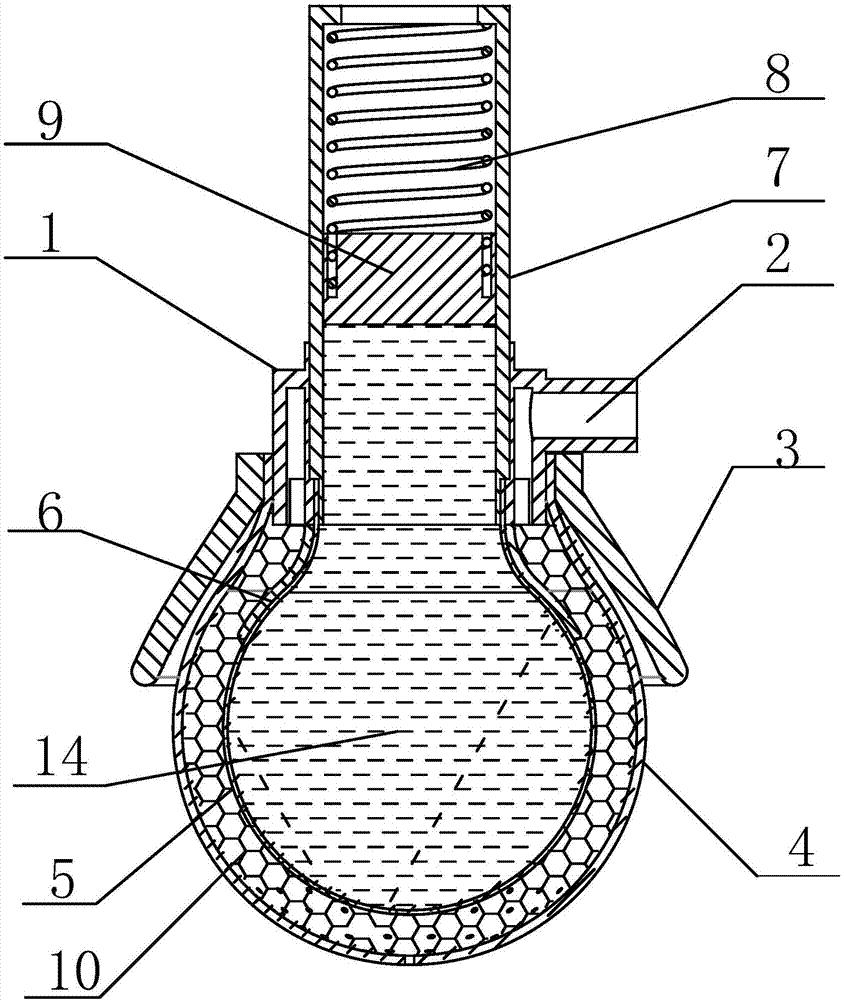
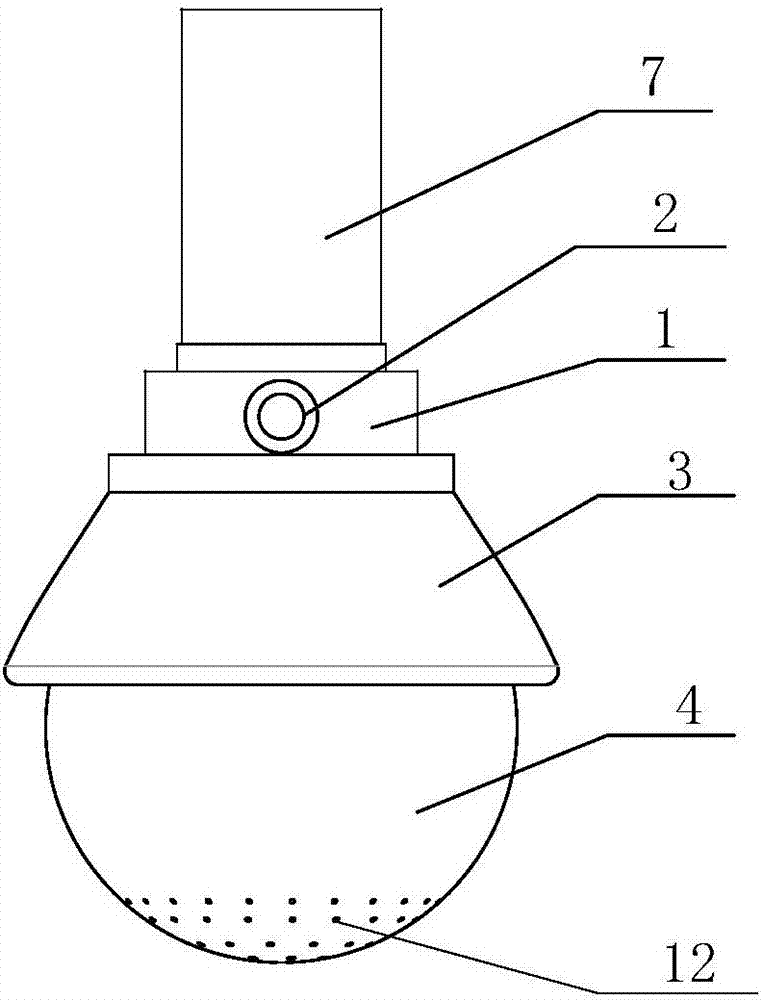
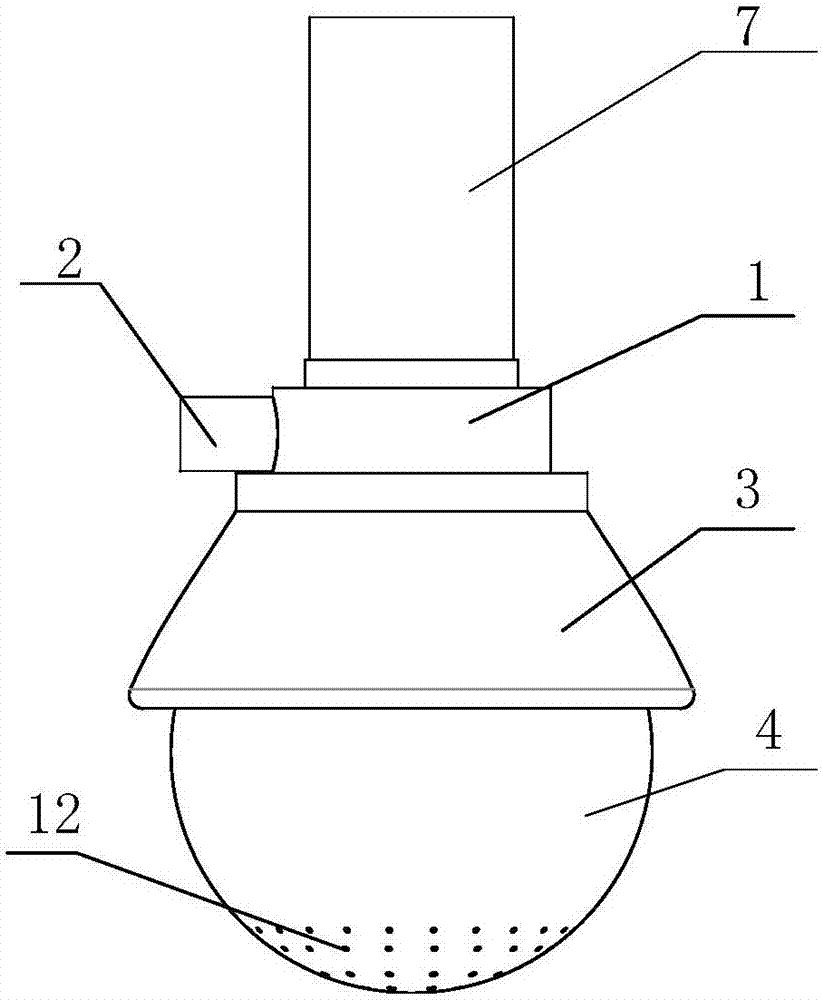
[0032] A porous double-layer fluid adaptive robot hand device according to the present invention includes a base, an air source, an air port and a first flexible film; the first flexible film is a hollow structure made of deformable material, and the first The flexible film includes an outlet; the base is connected to the first flexible film, the air port is connected to the air source, the air port is arranged on the base, and the air port is connected to the inside of the first flexible film; its characteristics In that: the porous double-layer fluid adaptive robot hand device also includes a piston cylinder assembly, a second flexible film and fluid; the piston cylinder assembly includes a sleeve, a piston and a spring, and the piston is slidably nested in the sleeve, so The t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More