

Method and apparatus for calibrating tool on robot flange coordinate system
A flange coordinate system and a calibration method technology are applied in the field of tool calibration method and device on the robot flange coordinate system, which can solve the problems of affecting workpiece processing efficiency, low tool coordinate system calibration efficiency, and complicated calibration operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
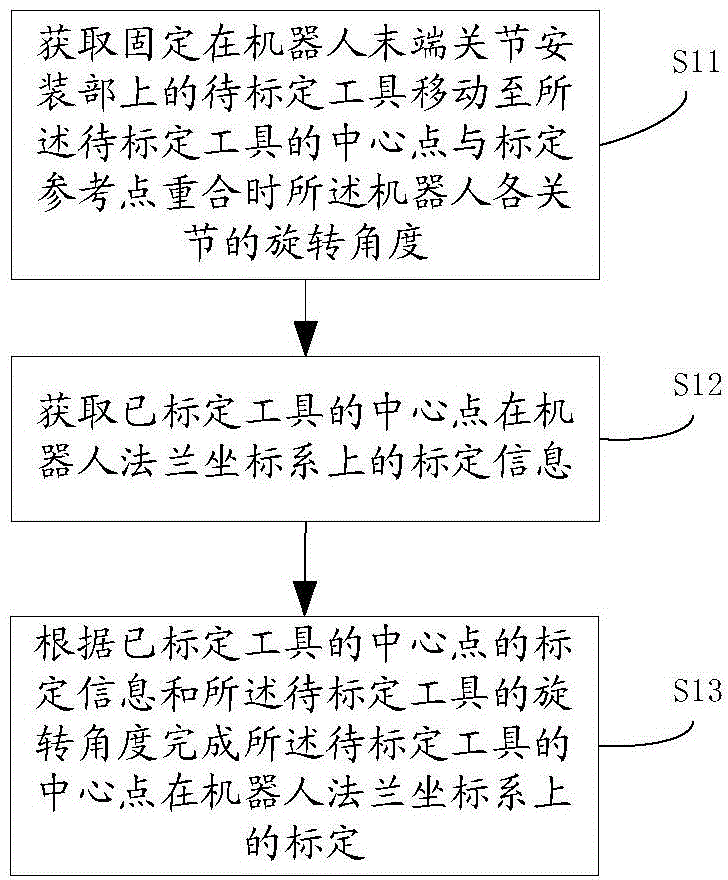
[0072] see figure 1 , an embodiment of the calibration method of the tool on the robot flange coordinate system of the present invention includes:
[0073] Step S11: Obtain the rotation angle of each joint of the robot when the tool to be calibrated fixed on the mounting part of the end joint of the robot moves to the point where the center point of the tool to be calibrated coincides with the calibration reference point.
[0074] In this embodiment, the robot is generally an industrial robot with no less than four joints, preferably an industrial robot with six joints. In other implementation manners, the robot may also be other types of robots such as a primary intelligent robot with no less than four joints, and there is no excessive limitation here.
[0075]After the tool to be calibrated is fixed on the mounting part of the end joint of the robot, the tool to be calibrated is moved so that the center point of the tool to be calibrated coincides with the calibration refer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More