

Novel under-actuated robot wrist device based on nonholonomic constraint
A non-holonomic constraint and constraint device technology, applied in the field of new underactuated robot wrist devices, can solve the problems of complex mechanical structure, high cost, and high quality, and achieve the effect of small size, low cost, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Preferred embodiments of the present invention are described in detail as follows in conjunction with accompanying drawings:
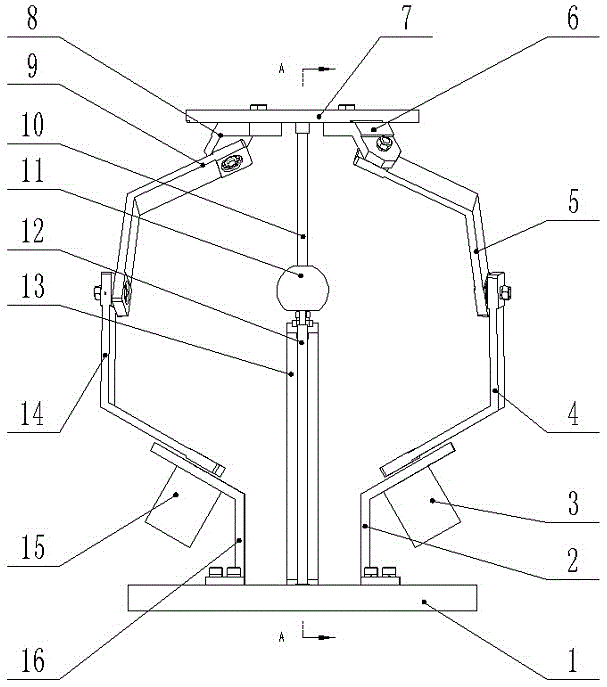
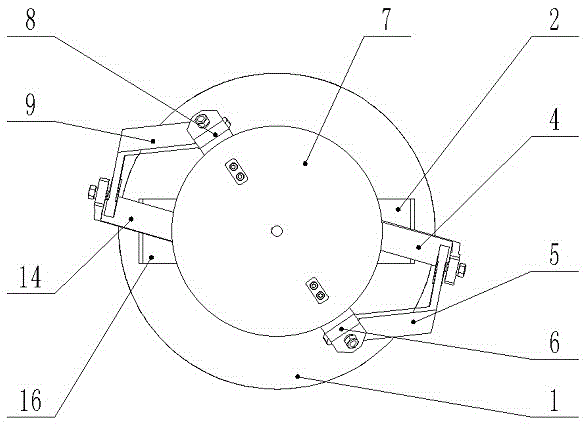
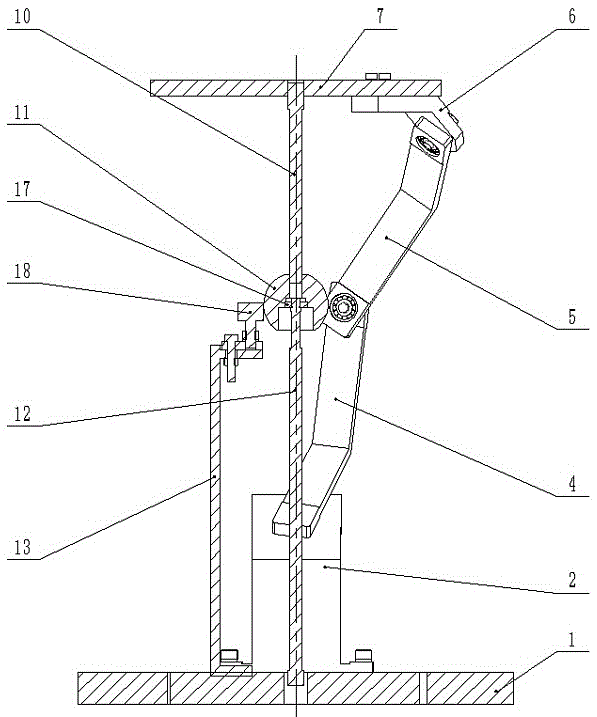
[0021] see figure 1 , figure 2 , image 3 , a novel underactuated robotic wrist device based on nonholonomic constraints, including a static platform, a dynamic platform, two branch mechanism chains, two driving power sources and an intermediate constraint device, the static platform passes through the two The branch mechanism chain is connected to the moving platform, and the two branch mechanism chains are respectively driven by two driving power sources, and are driven by the two branch mechanism chains, and the intermediate restraint device forms a non-holonomic constraint, thereby realizing the dynamic platform. Three degrees of freedom movement.
[0022] The structure of the intermediate restraint device is: one end of a connecting rod 10 is fixed on the lower surface of the circular plate 7, and the other end is fixedly connected with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More