

Upper and lower limb cooperative training and weight losing rehabilitation robot with variable track
A rehabilitation robot and collaborative training technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of complex structure of training equipment, difficult to meet the requirements of rehabilitation training, single movement form and trajectory, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
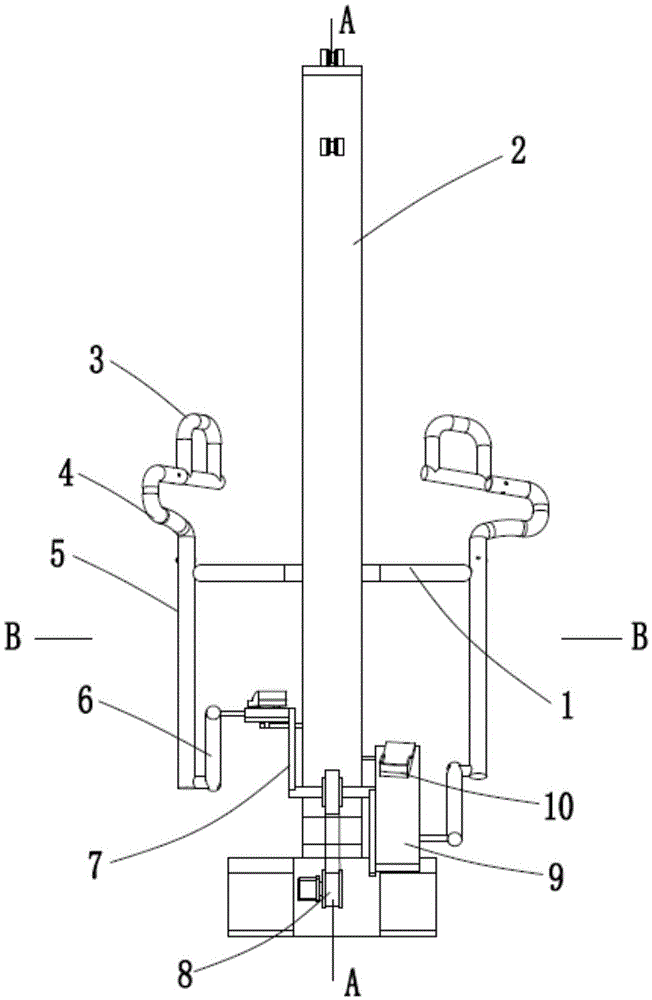
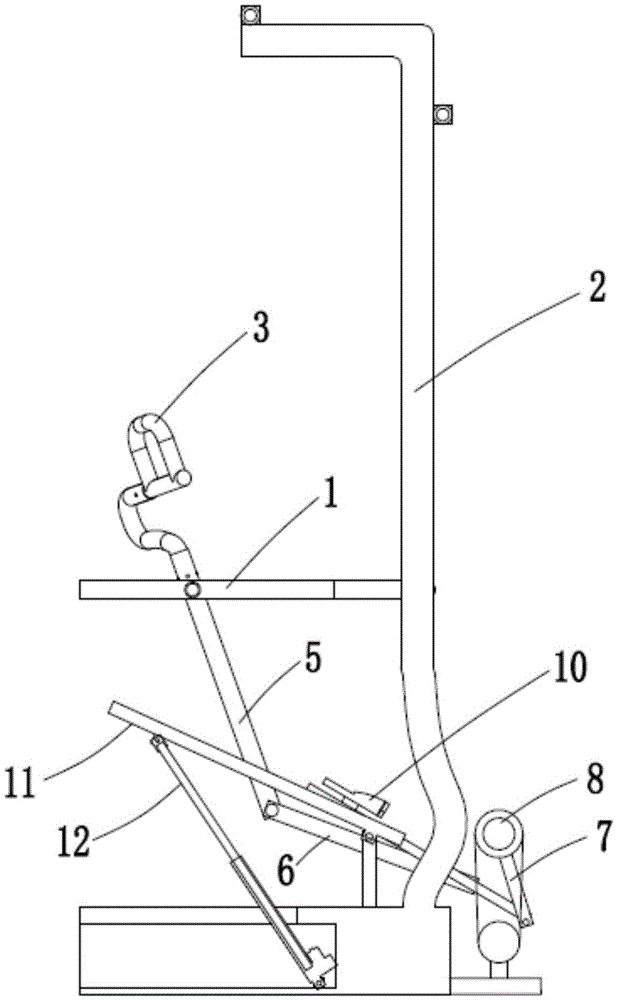
[0019] Embodiment: Referring to the accompanying drawings, the upper and lower limbs collaborative training and variable trajectory weight loss rehabilitation robot of this embodiment includes a frame 2, an upper limb training mechanism and a lower limb training mechanism;
[0020] Wherein, the upper limb training mechanism includes: a support rod 1, a first connecting rod 4, a second connecting rod 5 and a third connecting rod 6; The free end of the support rod 1 forms a rotating pair, the lower end of the second connecting rod 5 and the head end of the third connecting rod 6 form a rotating pair, and the first connecting rod 4 is inserted into the second connecting rod 5 to form a moving pair and a rotating pair. And the top of the first connecting rod 4 is provided with a handle 3; the specific structure is: the upper end of the second connecting rod 5 is a tubular structure, the lower end of the first connecting rod 4 is inserted in the second connecting rod 5, and The sid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More