

An upper limb rehabilitation exoskeleton based on spatial gravity balance
A gravity balance and exoskeleton technology, which is applied to sports accessories, manipulators, passive exercise equipment, etc., can solve the problems of complex structure, unable to fully realize gravity balance, etc., and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
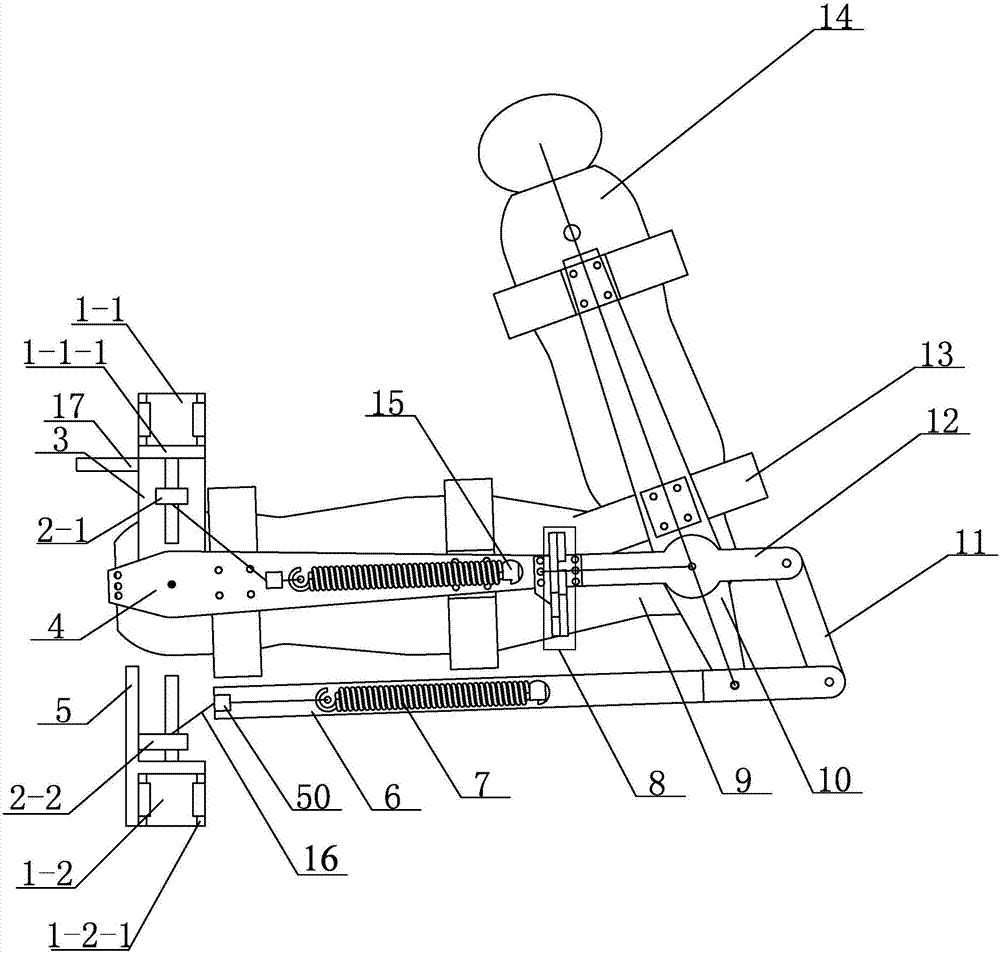
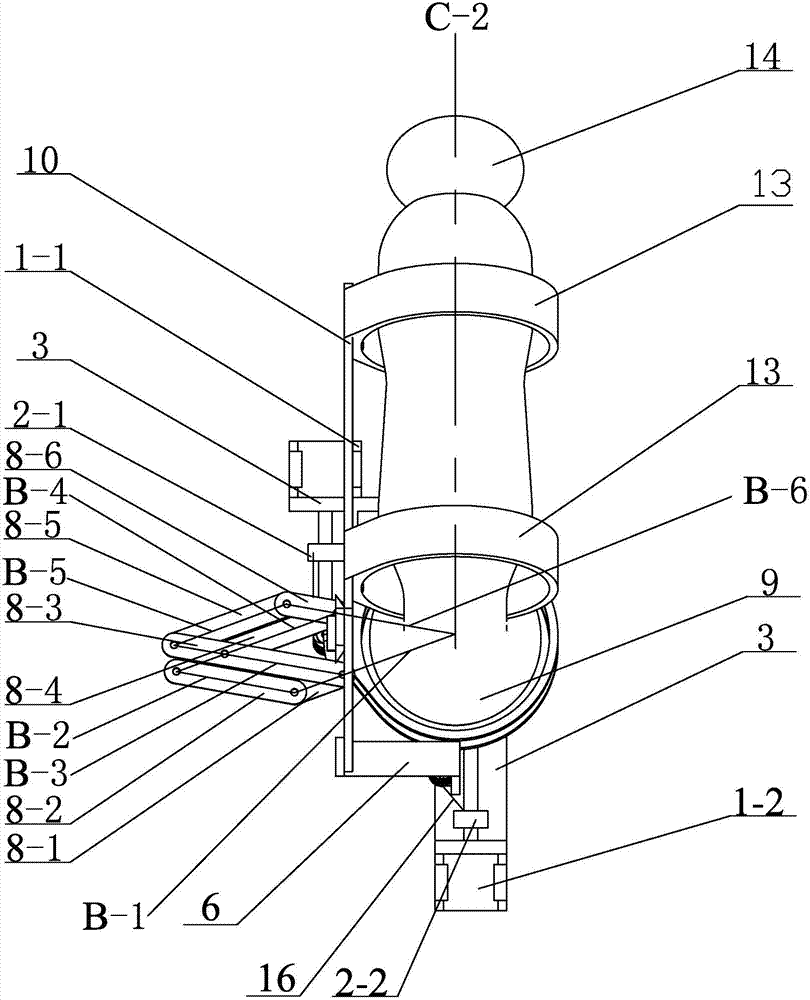
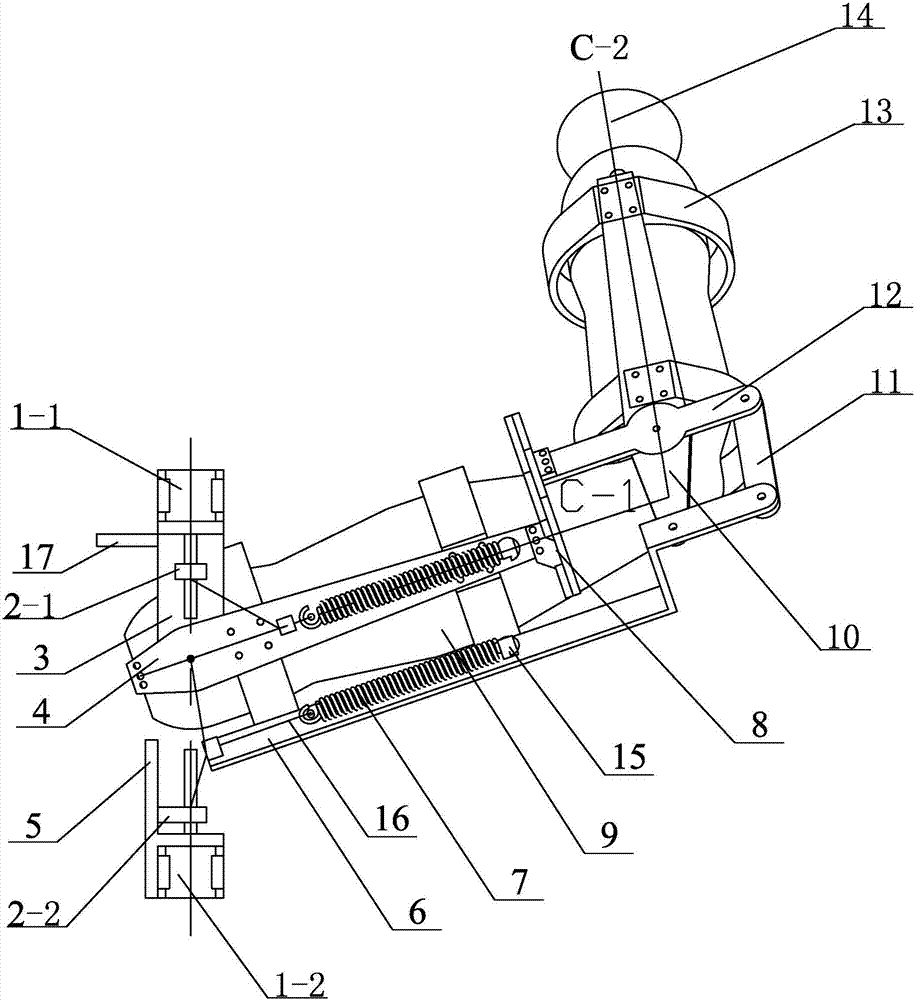
[0019] Specific implementation mode one: combine Figure 1 to Figure 9 Describe this embodiment, this embodiment includes boom adjustment motor 1-1, boom motor mount 1-1-1, forearm adjustment motor 1-2, forearm motor mount 1-2-1, boom adjustment nut 2 -1. Forearm adjustment nut 2-2. Shoulder joint upper frame 3. Shoulder joint connecting frame 17. Shoulder joint lower frame 5. Exoskeleton upper arm 4. Balance link 6. Two adjustment components, axial rotation of the upper arm Part 8, auxiliary link 11, exoskeleton rotating arm 12, exoskeleton forearm 10 and a plurality of binding mechanisms 13,
[0020] The big arm motor seat 1-1-1 is installed on an end of the upper frame 3 of the shoulder joint, and one side of the shoulder joint connecting frame 17 is connected with the upper frame 3 of the shoulder joint, and the other side of the shoulder joint connecting frame 17 is connected with the body of the wearer. connection, the other end of the shoulder joint upper frame 3 is ro...
specific Embodiment approach 2
[0023] Specific implementation mode two: combination Figure 1 to Figure 5 Describe this embodiment, the adjustment assembly of this embodiment includes a steel wire rope 16, a spring fixing buckle 15, a connecting seat 50 and a spring 7, and one end of the spring 7 is fixedly installed on the balance link 6 or the exoskeleton arm 4 through the spring fixing buckle 15 , the connection seat 50 is installed on the balance link 6 near the side of the arm adjustment nut 2-2, or the connection seat 50 is installed on the exoskeleton arm 4 near the side of the arm adjustment nut 2-1, and the wire rope 16 One end is fixedly connected with the forearm adjustment nut 2-2, and the other end of the wire rope 16 is connected to the other end of the spring 7 through the connecting seat 50 on the balance connecting rod 6, or one end of the wire rope 16 is fixed with the boom adjustment nut 2-1 To connect, the other end of the wire rope 16 passes through the connection seat 50 on the exoskel...
specific Embodiment approach 3
[0024] Specific implementation mode three: combination Figure 1 to Figure 5 Describe this embodiment, one end of the wire rope 16 of this embodiment is fixedly connected with the forearm adjustment nut 2-2, the other end of the wire rope 16 passes through the connecting seat 50 on the balance connecting rod 6 and is connected with the other end of the spring 7, and the spring The other end of 7 realizes expansion and contraction under the drive of forearm adjustment nut 2-2 and steel wire rope 16;
[0025]Or one end of the wire rope 16 is fixedly connected with the boom adjustment nut 2-1, and the other end of the wire rope 16 passes through the connection seat 50 on the exoskeleton boom 4 and is connected with the other end of the spring 7, and the other end of the spring 7 is on the boom. Realize expansion and contraction under the drive of adjustment nut 2-1 and steel wire rope 16. With such arrangement, it is convenient to realize the extension and flexion of the exoskel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More