An improved manipulator
A manipulator and an improved technology, applied in the field of manipulators, can solve problems such as falling off, and achieve the effects of grasping products well, improving production efficiency and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
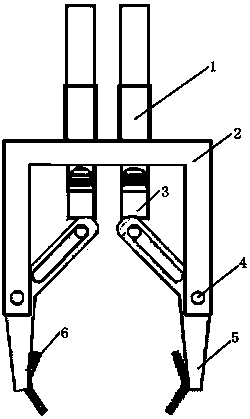
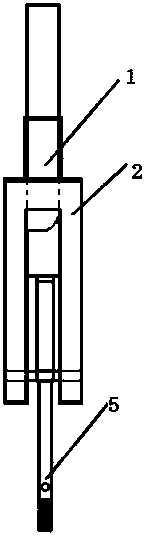
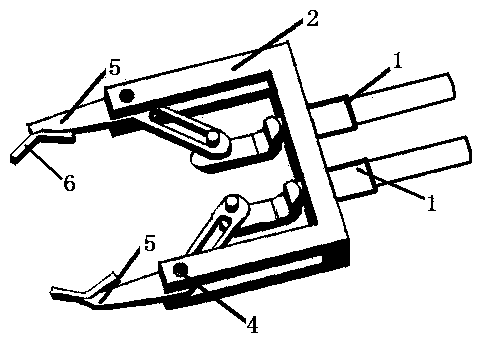
[0022] An improved manipulator comprising two clamping jaws 5, a U-shaped rod 2, two vertical rods 1; the bottom of the U-shaped rod 2 is provided with two circular holes through which the two vertical rods 1 can pass; two clamping jaws 5 Both include the head end, the bend and the tail end in turn. The bending includes a bend, and a long hole is opened at the end; the two vertical rods 1 in turn include the vertical rod 1 body, which is placed in the U-shaped rod 2 round hole Diameter expansion section and protrusion 3; both the expansion section and protrusion 3 are provided with a groove for arranging the end of the clamping jaw 5, and the protrusion 3 is engaged with the elongated hole to realize the two vertical rods 1 respectively rotating and connecting the two clamps Claw 5; both tops of the U-shaped rod 2 are provided with concave grooves that can be bent, and the bend is pivoted at the top of the U-shaped rod 2; the top of the clamping claw 5 is fixed with an "L"-shape...
Embodiment 2
[0030] The difference from the first embodiment is that in this embodiment, the end of the body of the vertical rod 1 that is not connected to the enlarged diameter section is provided with a bearing, and the motor shaft is rotatably connected through the bearing.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com