

Security service robot and intelligent obstacle avoidance method of robot in complex environment
A technology for service robots and complex environments, which is applied in the field of obstacle avoidance methods for intelligent security service robots in complex environments and security service robots, achieving the effects of good maneuverability, high accuracy of obstacle avoidance, and reasonable and perfect design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
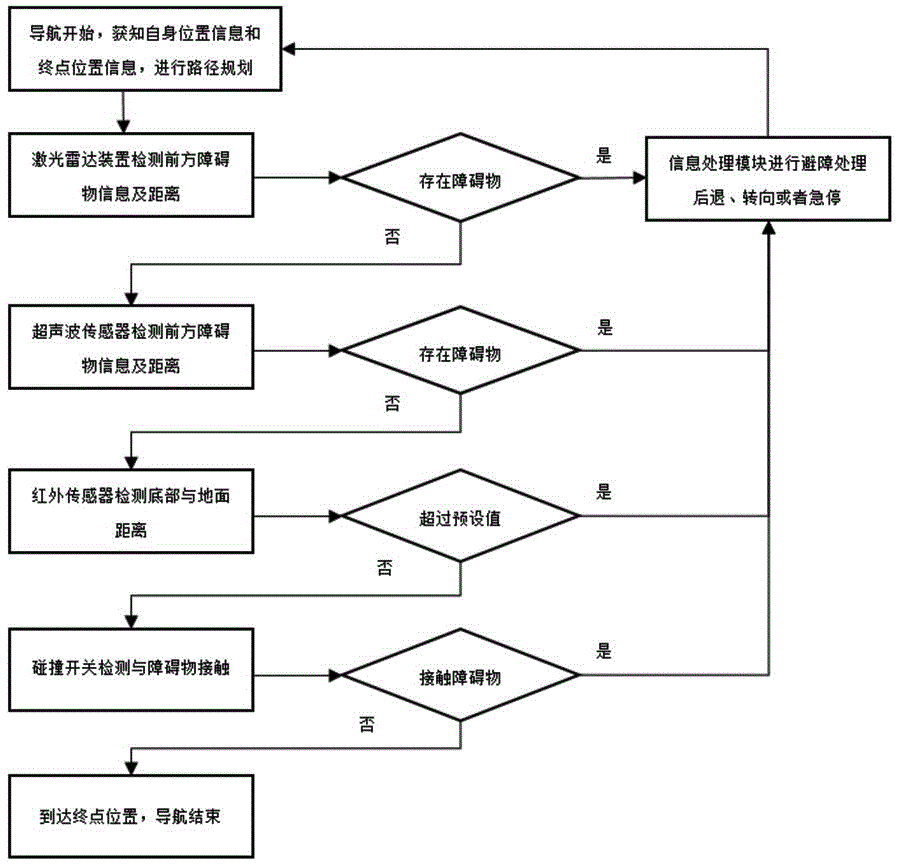
[0033] Such as figure 1 As shown, an intelligent security service robot complex environment obstacle avoidance method of the present invention is an organic fusion of multiple obstacle avoidance methods; it includes:
[0034] S1: Laser obstacle avoidance; after the offline map is established, use laser radar to detect obstacles within the effective range and the distance between the robot and obstacles in real time, mark them as coordinates on the map, and bypass these obstacles in path planning;
[0035] S2: Ultrasonic obstacle avoidance; in the case that no obstacle is detected by the laser radar method, rely on the ultrasonic sensing method to assist in detecting obstacles and distance information, and realize obstacle avoidance;
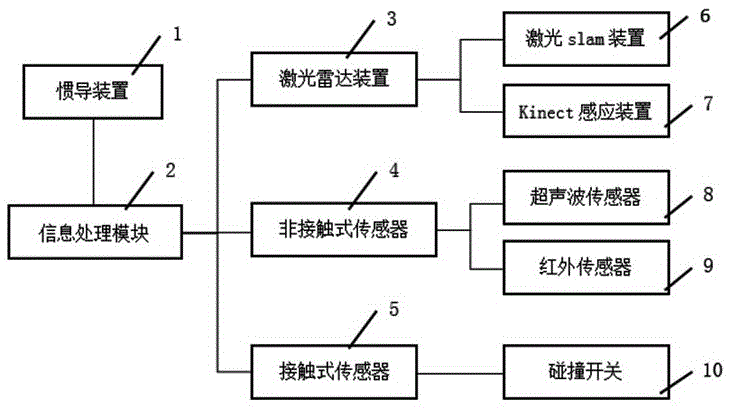
[0036] S3: Infrared obstacle avoidance; if the infrared sensor 9 detects that the distance between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More