

Tracking method of diver
A frogman and movement technology, applied in the field of target state estimation, can solve the problems of low tracking accuracy and poor stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
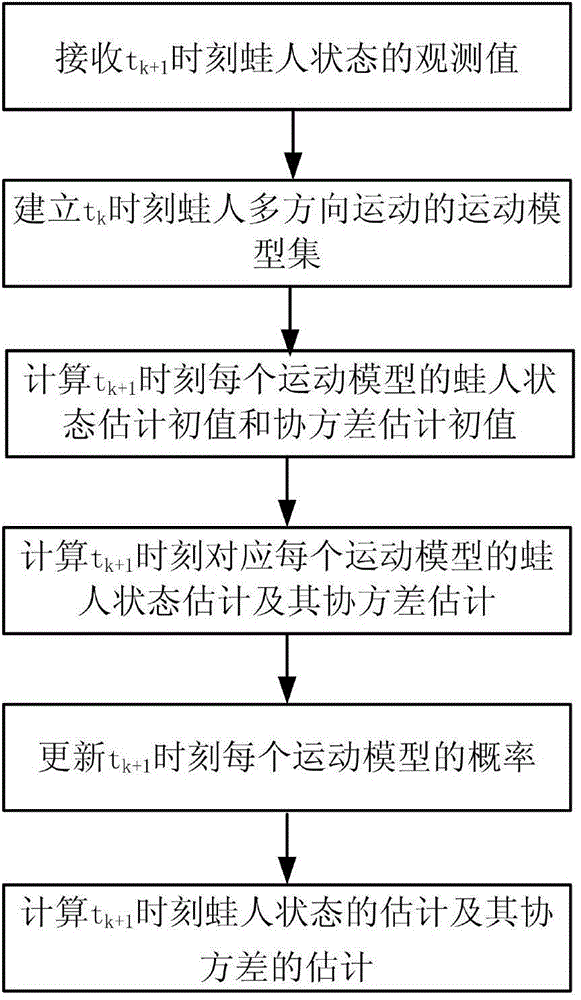
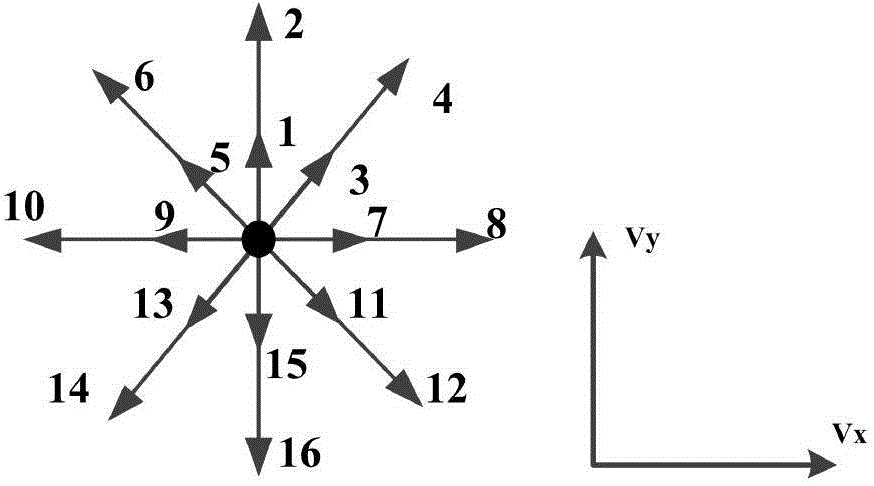
[0055] Based on the comprehensive analysis of the characteristics of the frogman's movement, the present invention establishes a multi-directional motion model set describing the frogman's motion, and integrates the motion model set into an interactive multi-model (IMM) algorithm, and utilizes multiple groups of parallel filter estimation The method realizes the state estimation of the frogman under the multi-directional motion model, and finally, according to the updated model probability, the estimation results of each model are fused to complete the state estimation of the frogman.
[0056] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0057] The method of the present invention is based on the assumption that the frogman moves in a two-dimensional plane, ignoring the height information.
[0058] Such as figure 1 Shown, a kind of tracking method of sports frogman, described method comprises: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More