Target object tracking method and device
A target object, object technology, applied in the field of image processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
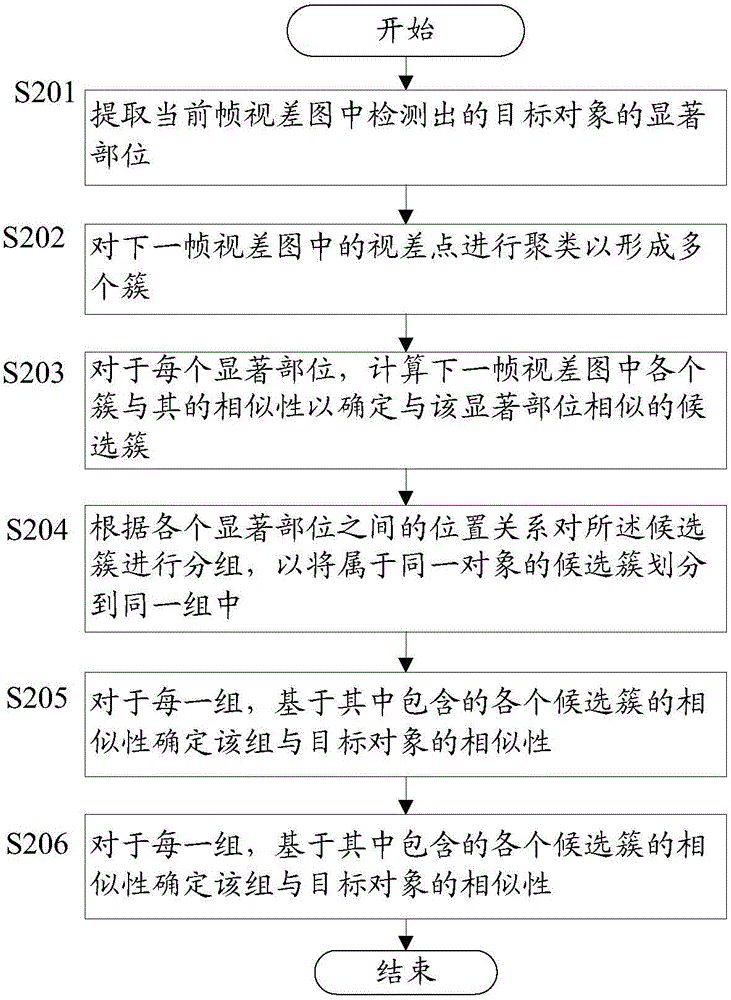
[0026] figure 2 A flow chart of the target object tracking method according to the first embodiment of the present invention is shown.
[0027] Such as figure 2 As shown, in step S201, the salient parts of the target object detected in the disparity map of the current frame (frame N) are extracted.
[0028] As mentioned above, each pixel in the disparity map represents a disparity value, which can be obtained through a stereo matching method. However, for some pixels whose disparity values cannot be calculated through stereo matching, these pixels are points without disparity values. According to the principle of stereo matching, it can be known that the disparity value can usually be calculated for the pixels located on the edge of the object whose gray scale changes. Therefore, for the pixels on the edge where the gray level changes, there is usually a parallax value. For example, Figure 3(a) and 3(b) The schematic diagrams respectively illustrate the grayscale im...
no. 2 example
[0078] The target object detection method according to this embodiment is basically the same as the method in the first embodiment, the only difference is that the target object detection method according to this embodiment further includes: determining each salient part of the target object in the disparity map of the current frame Significance; assign weight values to each of the prominent parts, so that the weight value of the prominent part with higher significance is greater, and then in step S205' corresponding to step S205 in the first embodiment, for each When a group determines its similarity with the target object, calculate the weighted sum of the similarities of each candidate cluster contained in the group as the similarity between the group and the target object, wherein the weight value of each candidate cluster is the same as the candidate cluster The weight value of similar salient parts. These differences are described below.
[0079] The saliency of each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com