

Six-degree-of-freedom robot with three branch chains
A degree of freedom, robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of multiple drives, affecting the motion accuracy of the moving platform, and complex control methods, achieving good load bearing, simple and reliable structure, and simple motion form. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
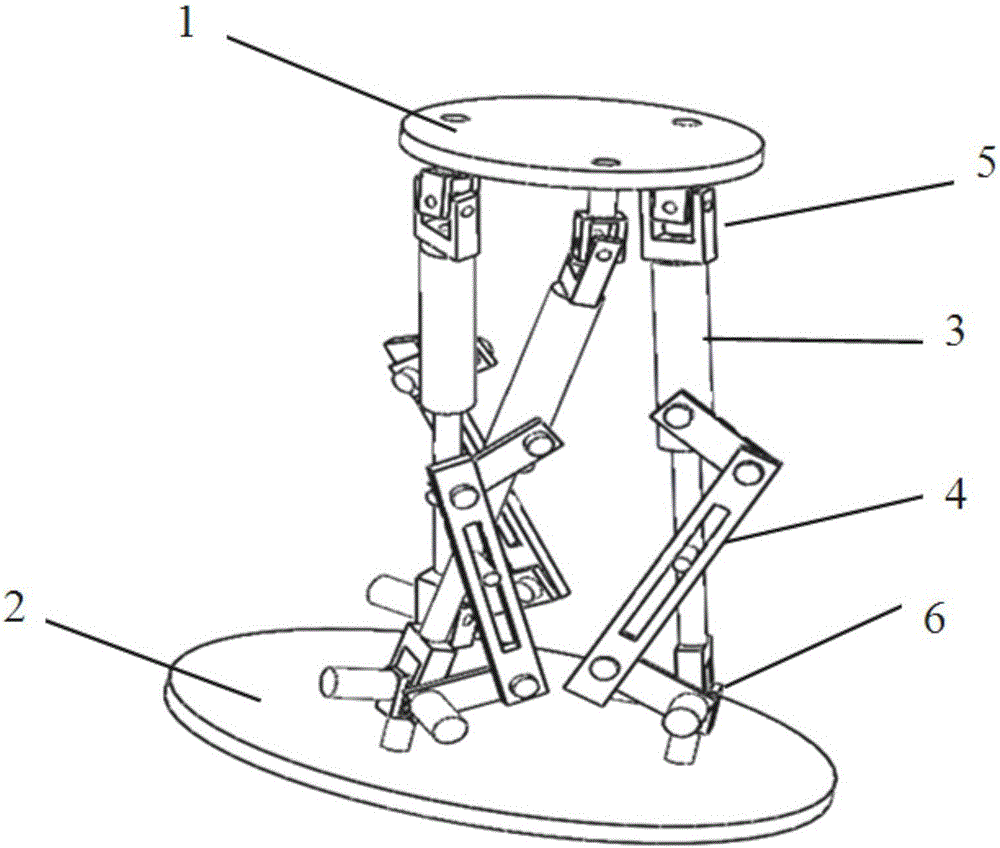
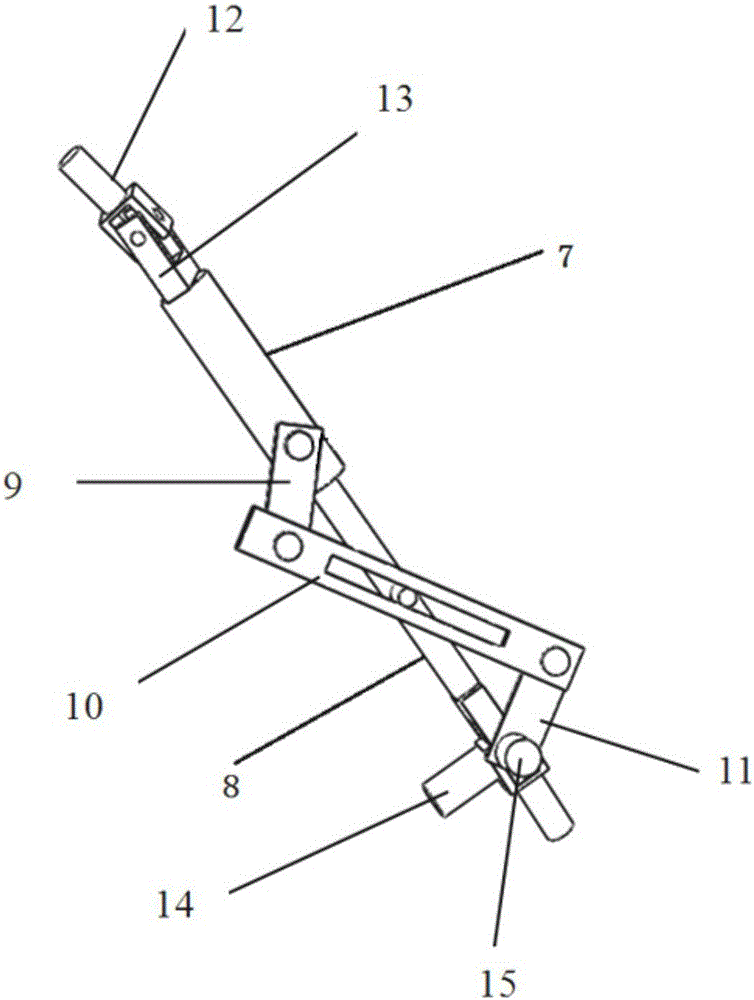
[0013] The invention provides a three-branched six-degree-of-freedom robot, which is composed of a moving platform 1, a fixed platform 2 and three uniformly distributed branch chains connecting the moving platform and the fixed platform, and is characterized in that each branch chain is fixed to the direction of the moving platform It includes a lower cross universal hinge 6 connected in sequence, a support telescopic rod assembly 3 and an upper cross universal hinge 5. The support telescopic rod assembly 3 is composed of a movable link 7 and a support link 8 capable of coaxial telescopic movement. The movable link The end of the end and the end of the support link are respectively connected with the upper cross universal hinge and the lower cross universal hinge, and the planar link assembly 4 is installed between the movable link, the support link and the upper hinge seat of the lower cross universal hinge, The plane connecting rod assembly 4 is composed of a lower connecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More