

Unmanned aerial vehicle man-machine interaction method based on three-dimensional continuous gesture recognition
A technology of dynamic gestures and interaction methods, which is applied in the field of human-computer interaction and can solve the problems of nonlinear fluctuation of gesture trajectory time and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0053] The concrete steps of the technical solution proposed by the present invention are as follows:
[0054] (1) Human skeleton tracking and gesture trajectory feature extraction and preprocessing
[0055] 1. Human skeleton tracking
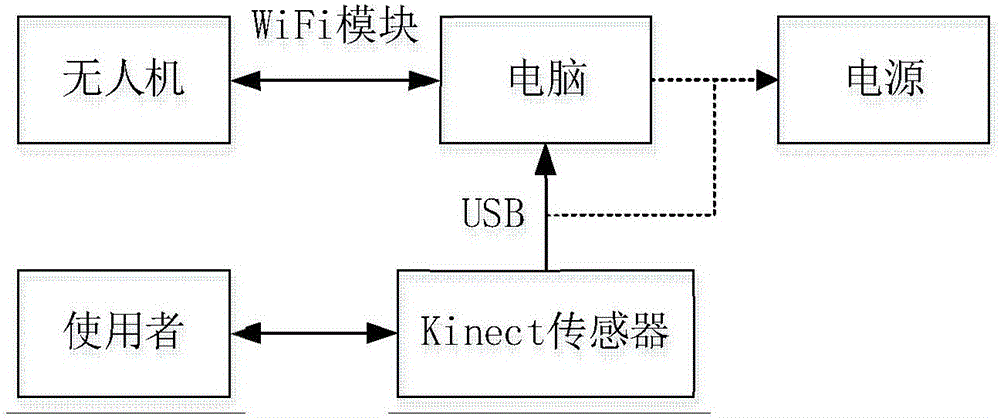
[0056] The Microsoft Kinect sensor can identify and obtain the skeleton information of the human body. The KinectSDK provided by Microsoft can track and recognize the human body, and obtain the three-dimensional position information and quaternion rotation information of 20 joint bone points from a single frame depth image. The present invention establishes a motion trajectory feature descriptor of a dynamic gesture based on data of key motion skeleton points obtained by KinectSDK, and uses KinectSDK to track joint points of a human body, thereby locating the position of a user's hand.
[0057] 2. Gesture track feature extraction and preprocessing
[0058] Extract gesture trajectory features
[0059] Since the movement of gesture recognitio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More