

A new teaching device for industrial robots
A technology of industrial robots and teaching devices, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as troublesome and prone to errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
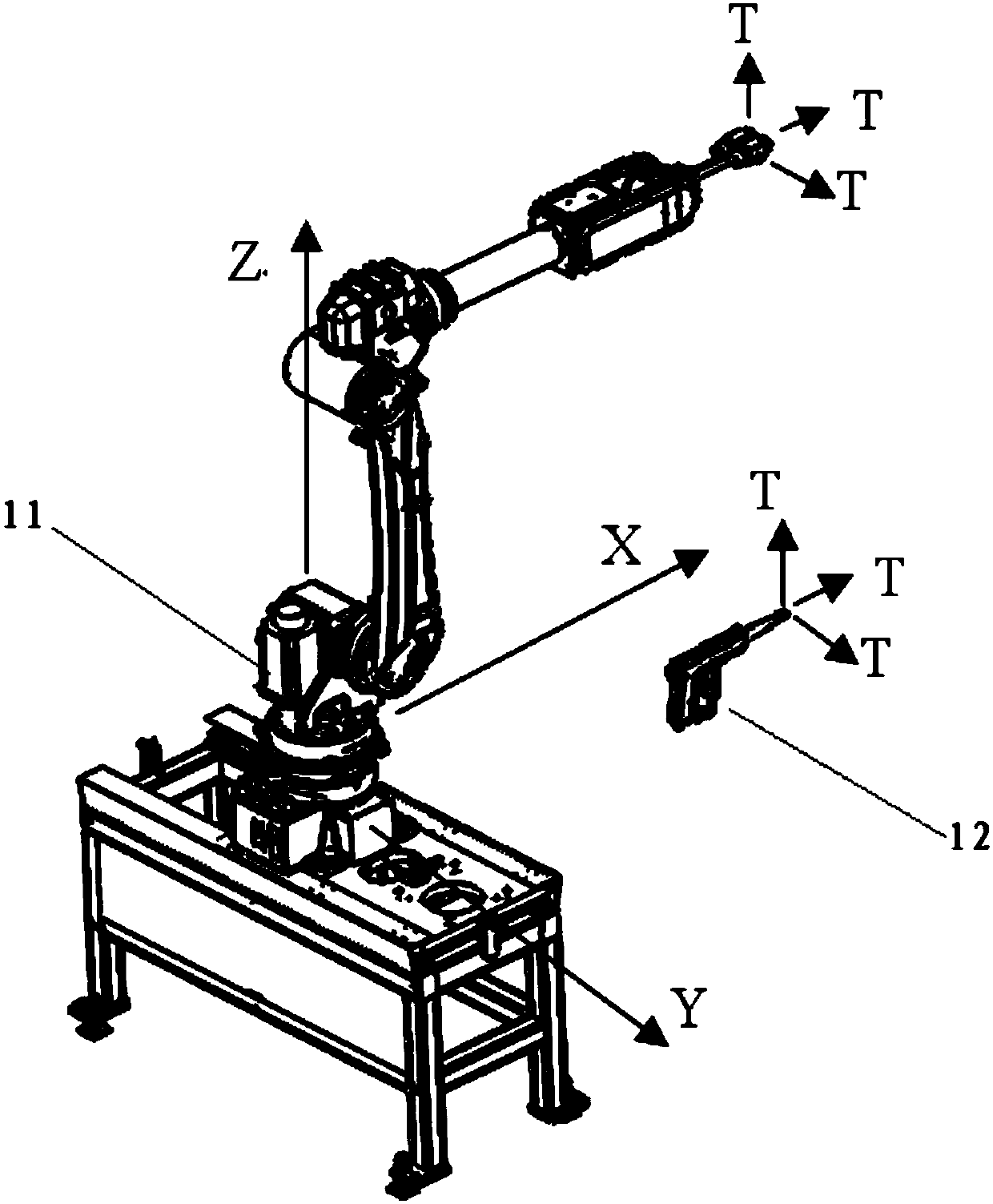
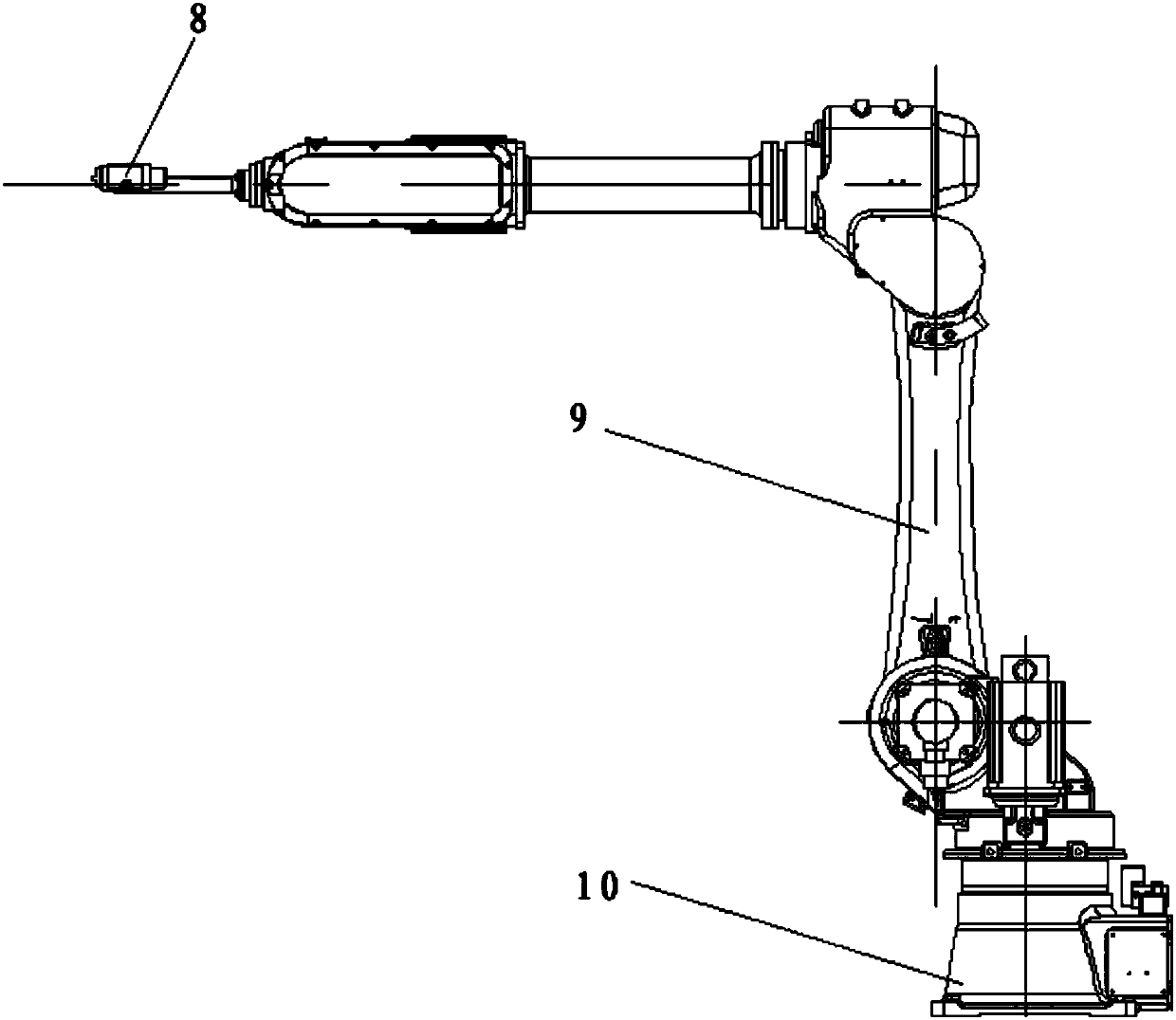
[0022] Such as Figure 1-5 As shown, the new teaching device for industrial robots according to the present invention includes a robot 11 and a handheld teaching device 12 .
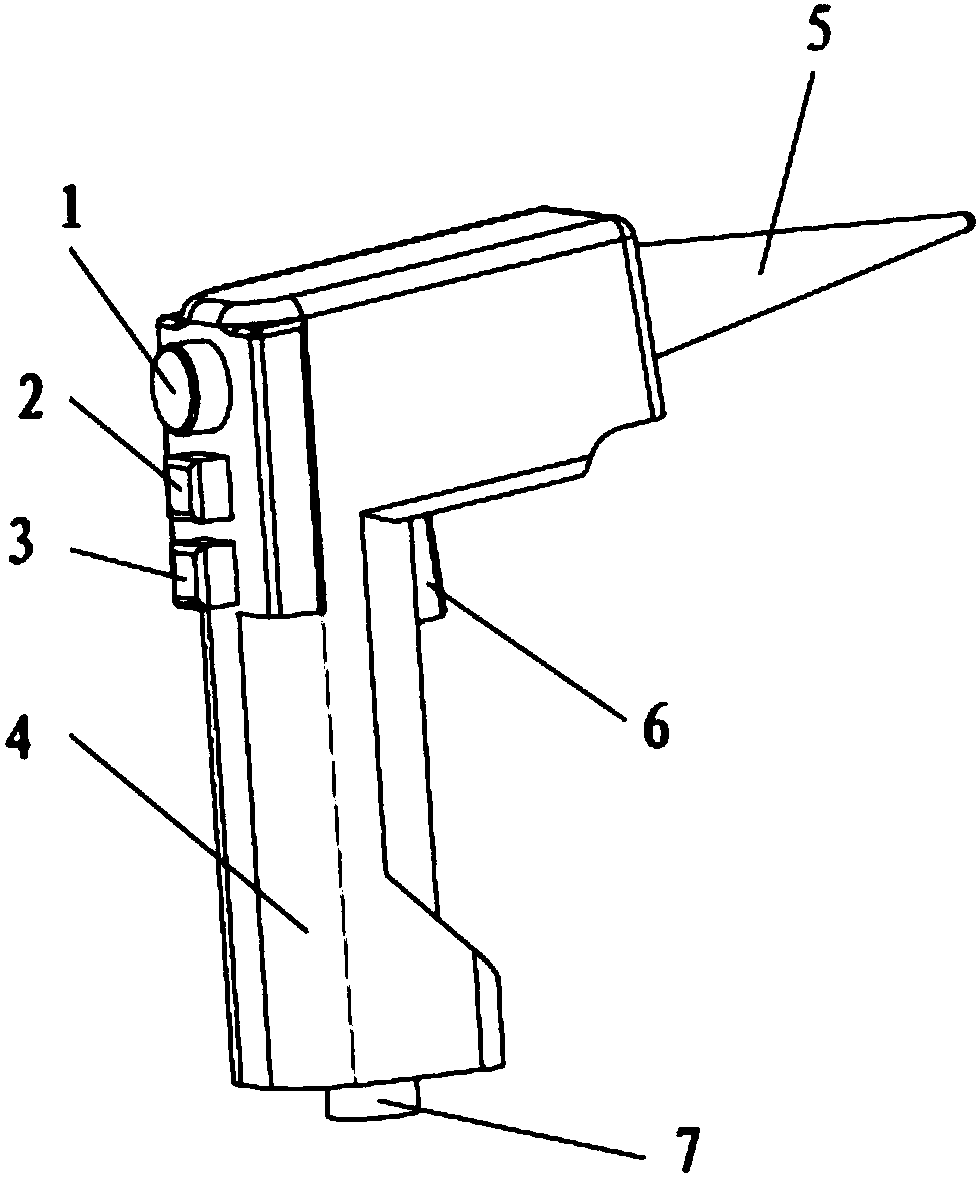
[0023] Such as figure 2 As shown, the handheld teaching pendant 12 includes an indicator light 1, a switch button 2, a confirmation button 3, a handle 4, a sensing terminal 5, an execution button 6, an interface 7, and an ultra-precision Inertial navigation element.
[0024] The recording of the path is achieved by using ultra-precise inertial navigation elements, including precise three-dimensional acceleration sensors and precision gyroscopes.
[0025] Wherein, the hand-held teaching pendant 12 has an L-shaped pistol structure as a whole, including a handle 4 located at the lower part, and an interface 7 is provided at the bottom of the handle 4 . There is an execution button 6 at the trigger position of the hand-held teaching pendant 12, and an indicator light 1, a switch button 2 and a confirmati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More