

Linear online seam tracking method for arc welding robot during welding
A robot welding and robot technology, applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve the problems of error, unconsidered lead distance, low tracking accuracy, etc., and achieve the effect of simple scheme
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0027] The present invention will be described in detail below in conjunction with embodiment:
[0028] Implement the process of the present invention:
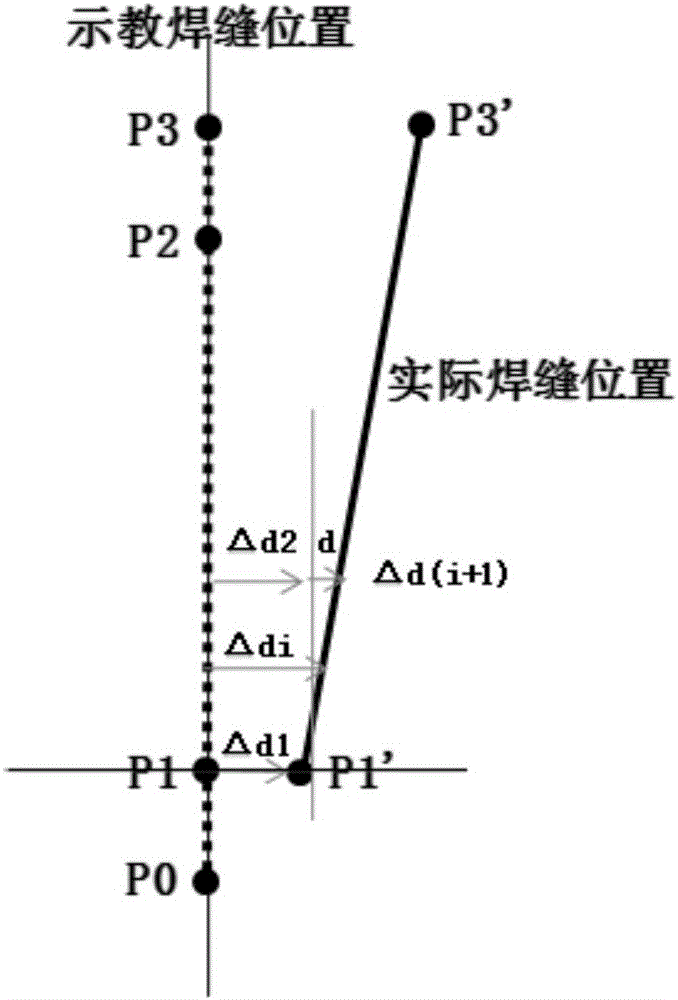
[0029] like figure 1 As shown, it indicates the teaching welding seam position and the actual welding seam position.
[0030] P1 is the starting point of the teaching welding seam, and P1' is the starting point of the actual welding seam.
[0031] P3 is the end point of the teaching weld, and P3' is the end point of the actual weld.
[0032] P0 is the position point separated from the starting point of the welding seam by the distance between the measurement sensor and the robot, and it is used as the starting point of the robot for measurement.
[0033] P2 is the position point separated from the end point of the welding seam by the distance between th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More