

Differential adjustable PID controller parameter project adjusting method
A technology of engineering setting and controller, which is applied to electric controllers, controllers with specific characteristics, etc., can solve the problems of unadjustable differential action of the controller and poor setting effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
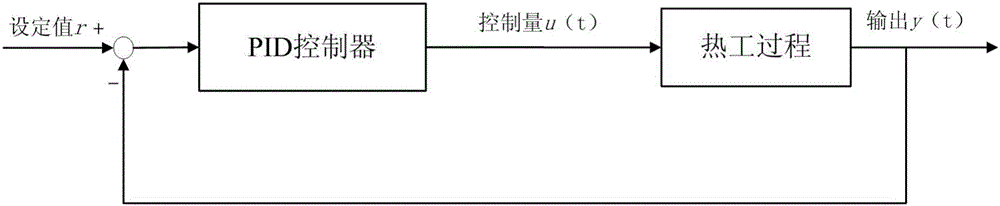
[0027] Step 1: A single-loop negative feedback control system is composed of a thermal process and a proportional-integral-derivative (PID) controller. The thermal process input is the output u(t) of the PID controller, and the output is y(t). The PID controller’s The input is the difference between the output set value r and y(t) of the thermal process, t is the time, and the transfer function of the thermal process is K is the steady-state gain of the process, T 0 is the time constant, n is the order of the process, s is the complex variable, and the transfer function of the PID controller is K P is the proportional coefficient, K I is the integral coefficient, K D is a differential coefficient, and satisfies: Where α is the differential share of the PID controller;
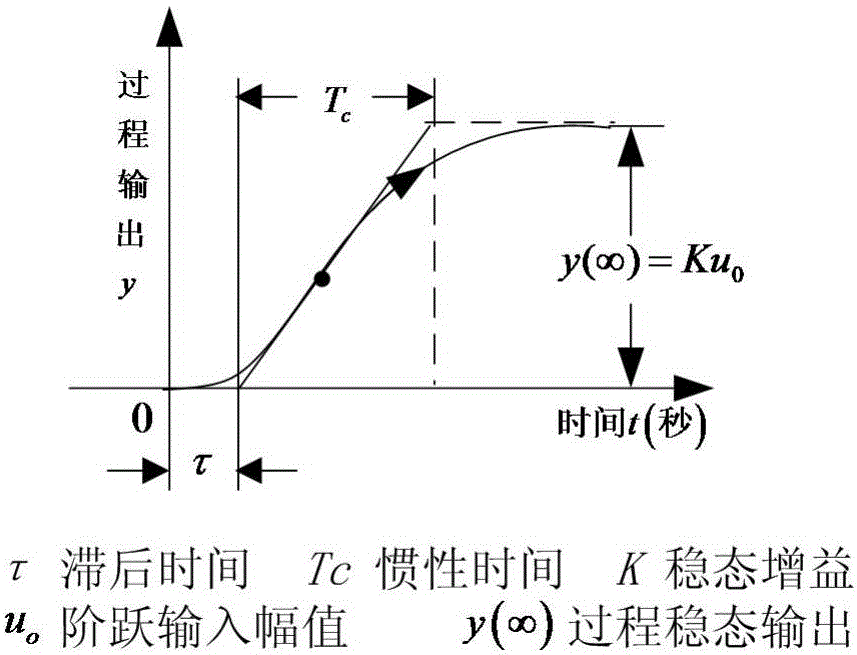
[0028] Step 2: Set the three parameters K and T of the thermal process tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More