

PCB plate handling robot capable of taking and placing materials accurately
A technology for handling robots and PCB boards, applied in the field of robots, can solve the problems of difficulty in improving the cutting efficiency of PCB boards and large workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
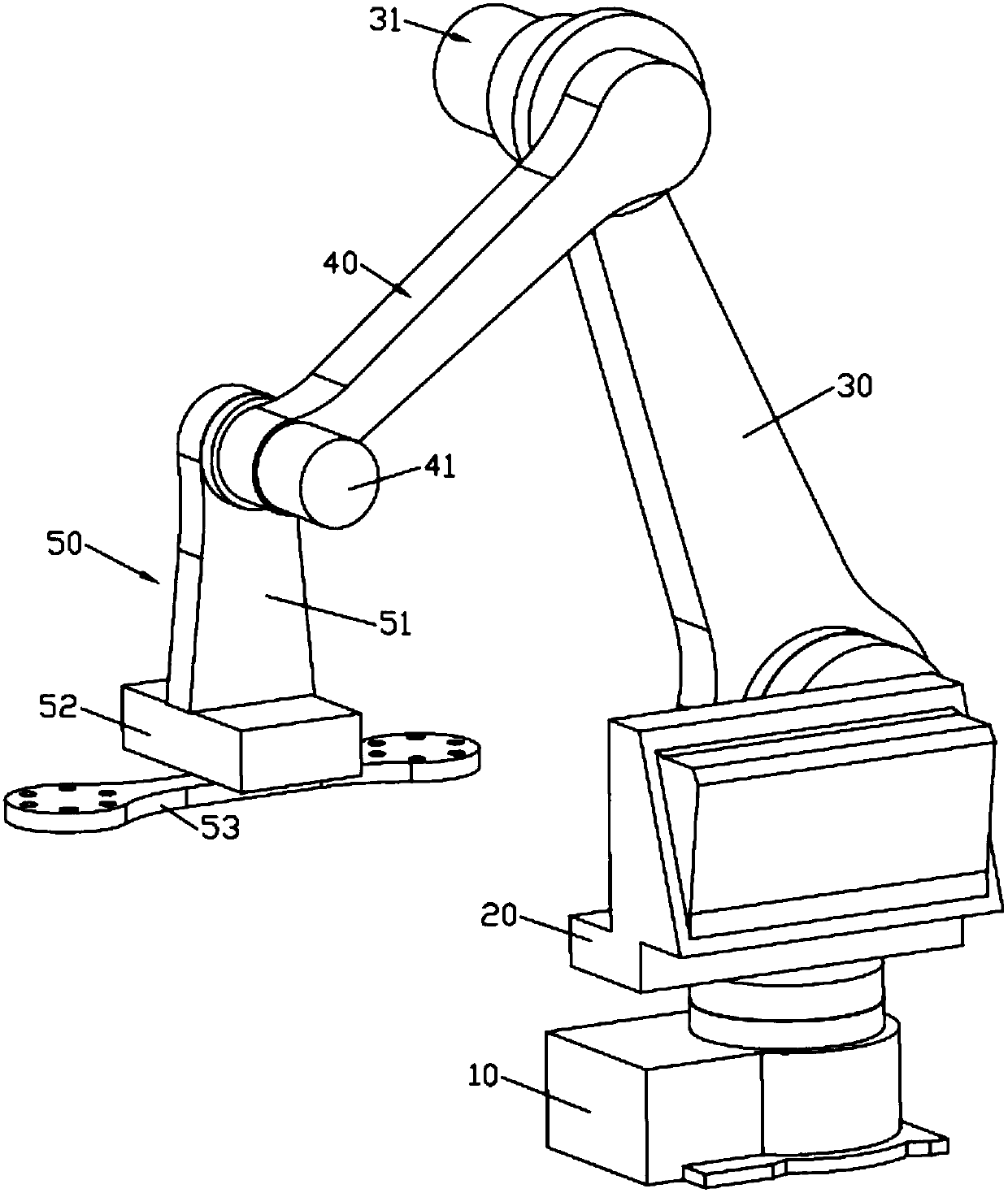
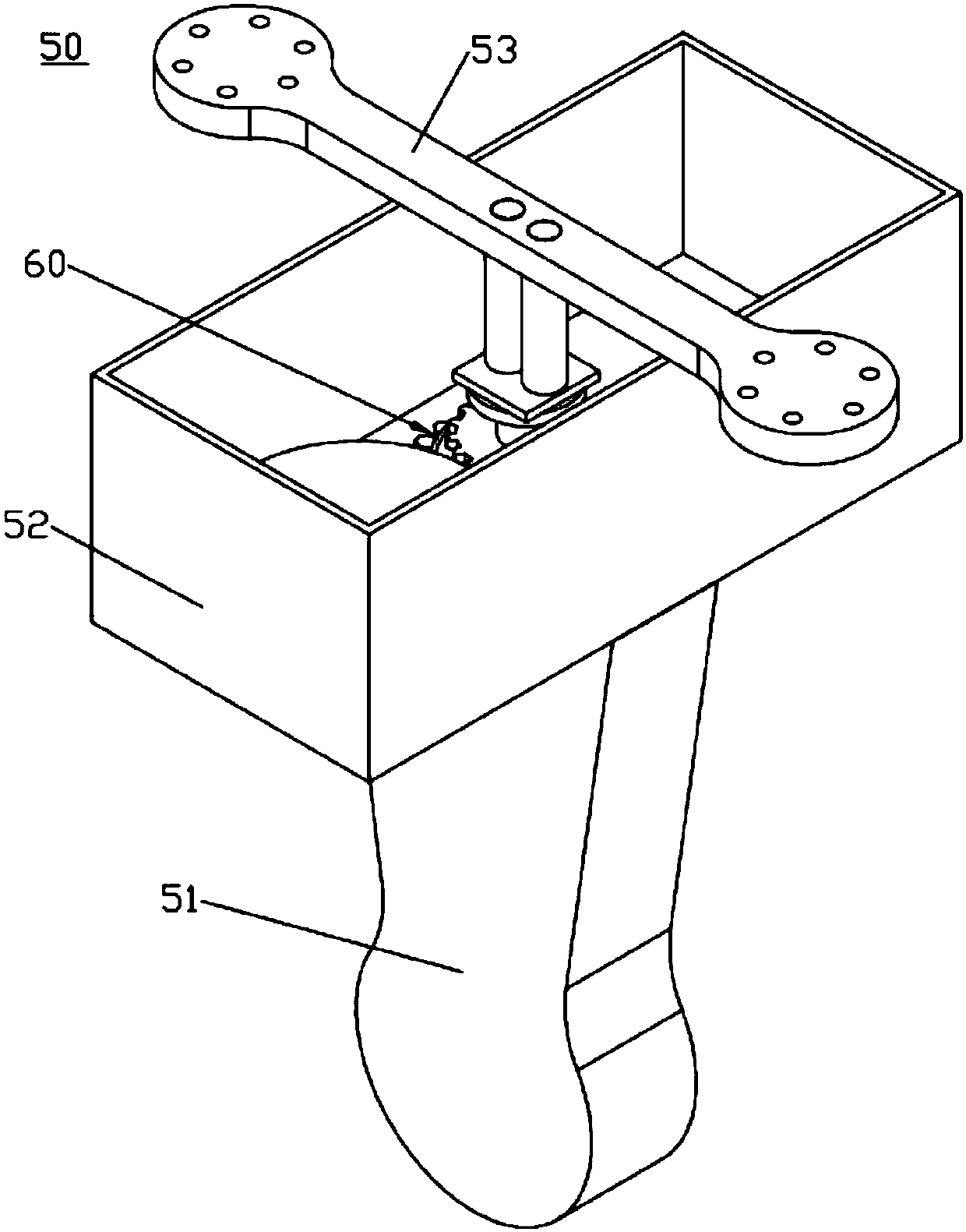
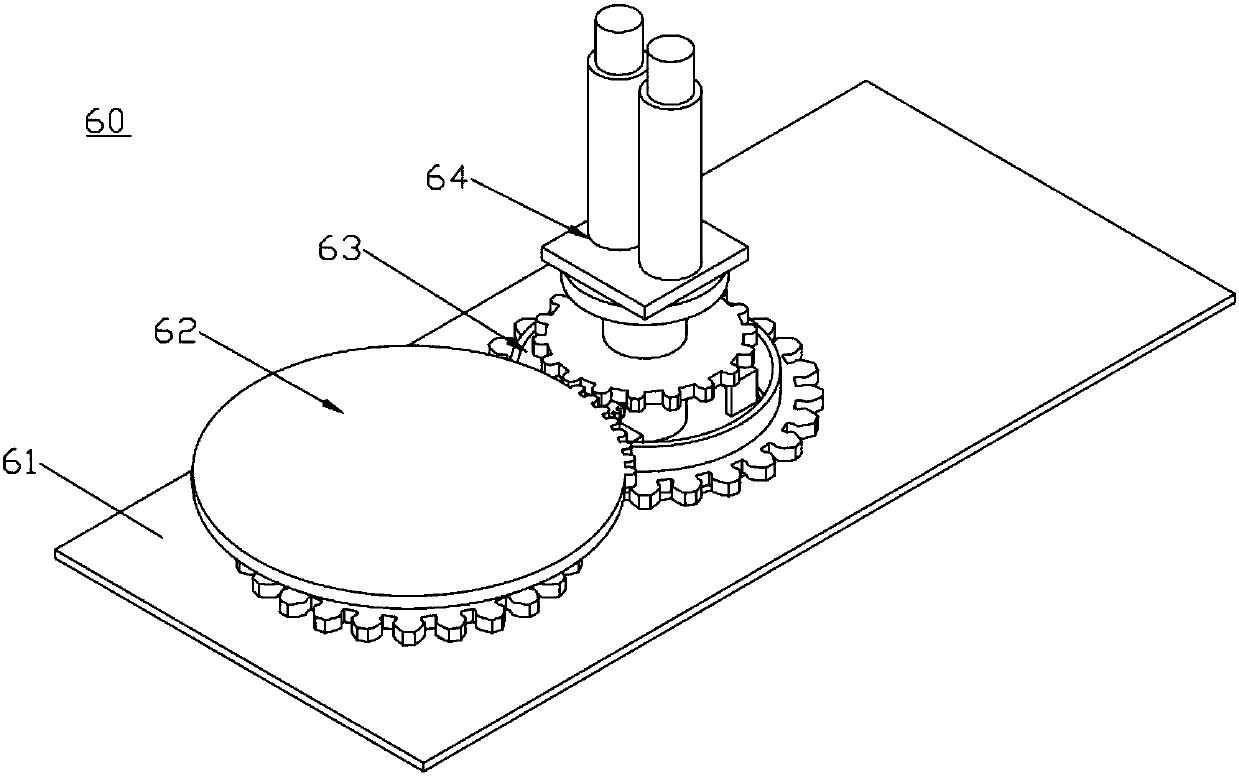
[0019] like Figure 1 to Figure 7 As shown, a PCB board handling robot that can accurately pick and place materials includes a base body 10, a waist swivel part 20 pivotally connected to the base body 10, a large arm 30 pivotally connected to the waist swivel part 20, and a The small arm 40 on the big arm 30, the manipulator 50 installed on the small arm 40; the manipulator 50 includes a pair of sucker groups, and a drive mechanism 60 that drives the pair of sucker groups to rotate; the drive mechanism 60 includes a base 61, Rotation drive device 62, lock assembly 63 and rotation assembly 64; Rotation assembly 64 includes a pair of positioning rods 641, rotation support 642 and first gear 643; Rotation support 642 upper end is fixed with a pair of positioning rods 641, middle part is fixed with the first gear 643; A gear 643, the lower end of which is pivotally connected to the base 61; the first gear 643 has a limit hole 6431; the lock assembly 63 includes an unlocking compon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More