

S-shaped soft-bodied robot
A robot and software technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of less research on snake-shaped soft robots, and achieve the effect of effective control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and specific embodiment, the working principle of the present invention is described in detail:
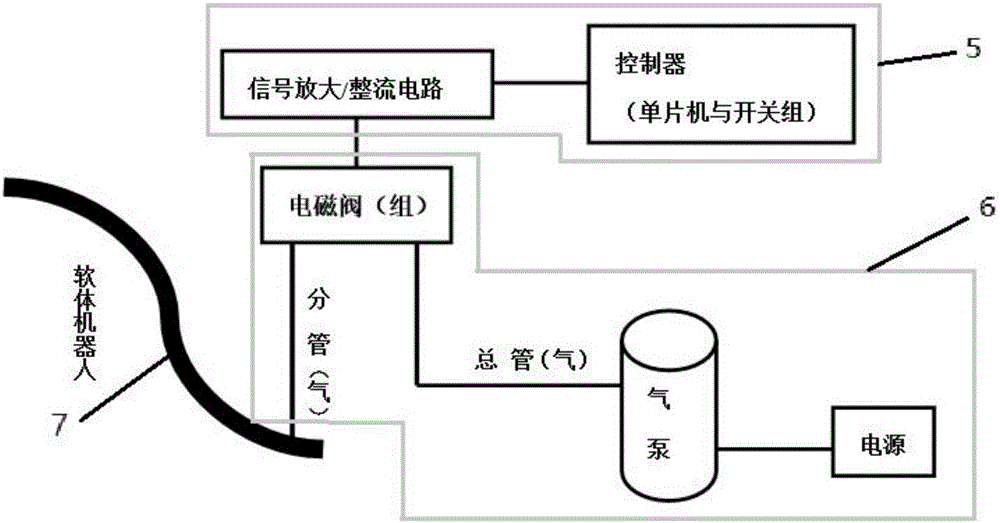
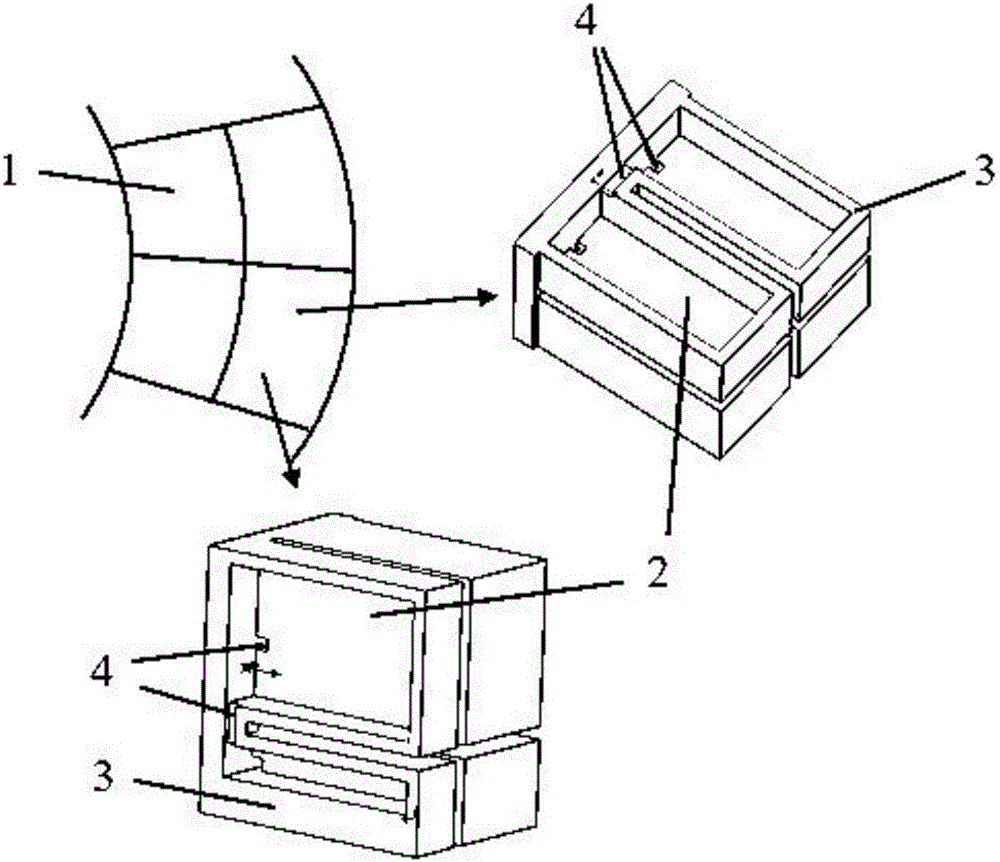
[0025] like figure 1 and figure 2 As shown, a snake-shaped soft robot of the present invention is composed of a motion base 7, a power system 6 and a signal system 5; The soft material is hollow cast, including the outer wall 3 and the inner space 2 surrounded by the outer wall 3 and the air passage 4 connecting the inner space 2. The inner space 2 of the unit body 1 is completely air-tight except for the air intake pipe.
[0026] The working principle of the invention is as follows:
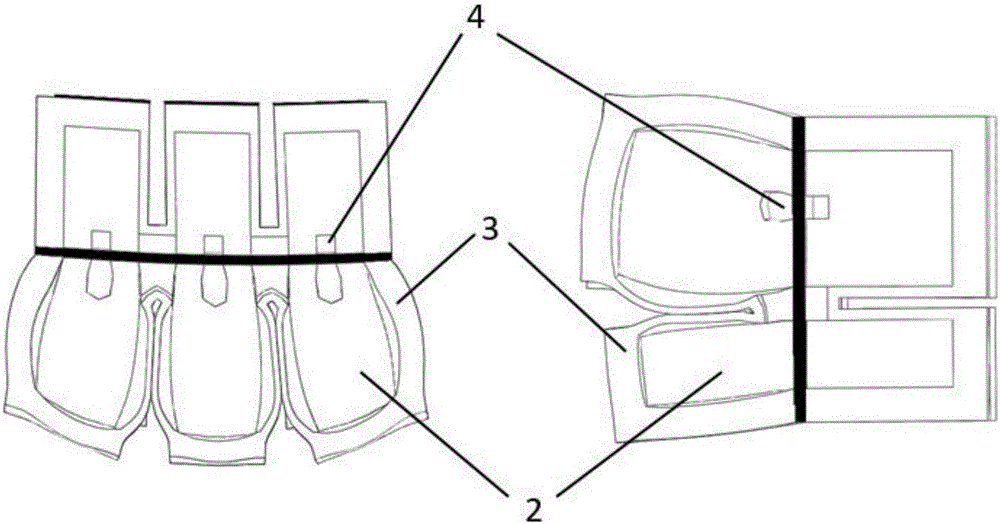
[0027] The arrangement of unit body 1 in the motion matrix is as follows figure 2 As shown, the changes of each section after inflating the inner space 2 are as follows image 3 As shown in the figure, only one side of the symmetrically arranged unit body is always inflated during the movement. At this time, the compression of the interna...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More