

A thermally deformable cavity-driven crawling soft robot
A thermal deformation, robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of not being able to turn around quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and specific embodiment, the working principle of the present invention is described in detail:
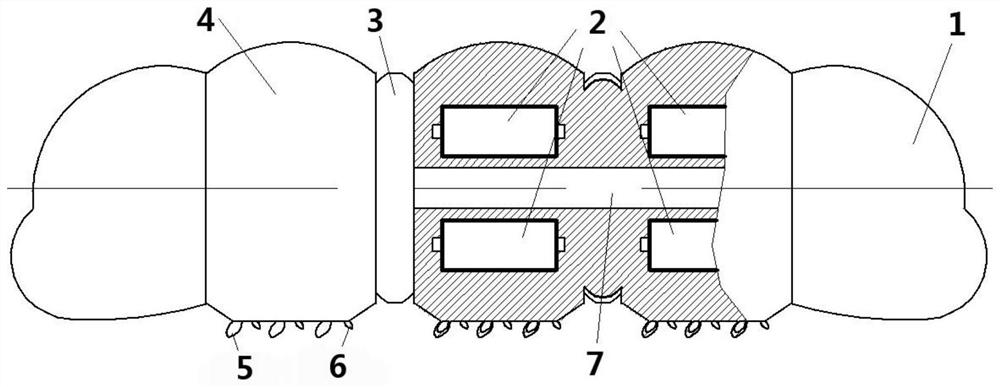
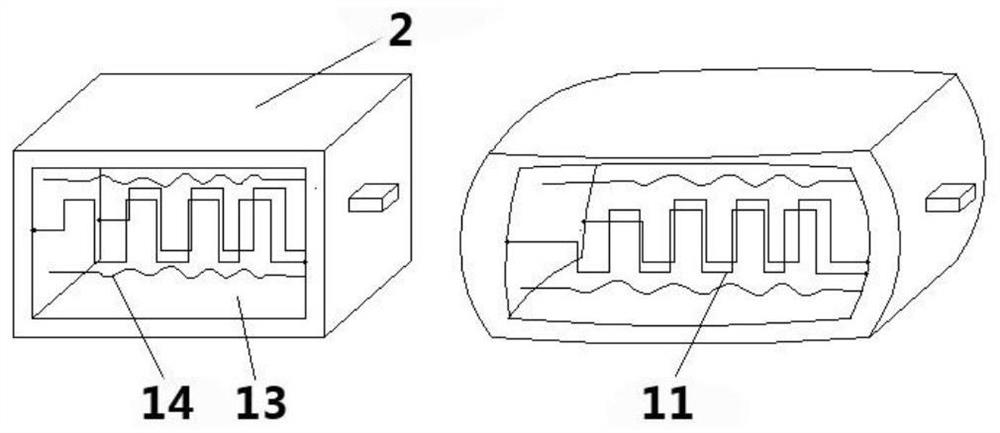
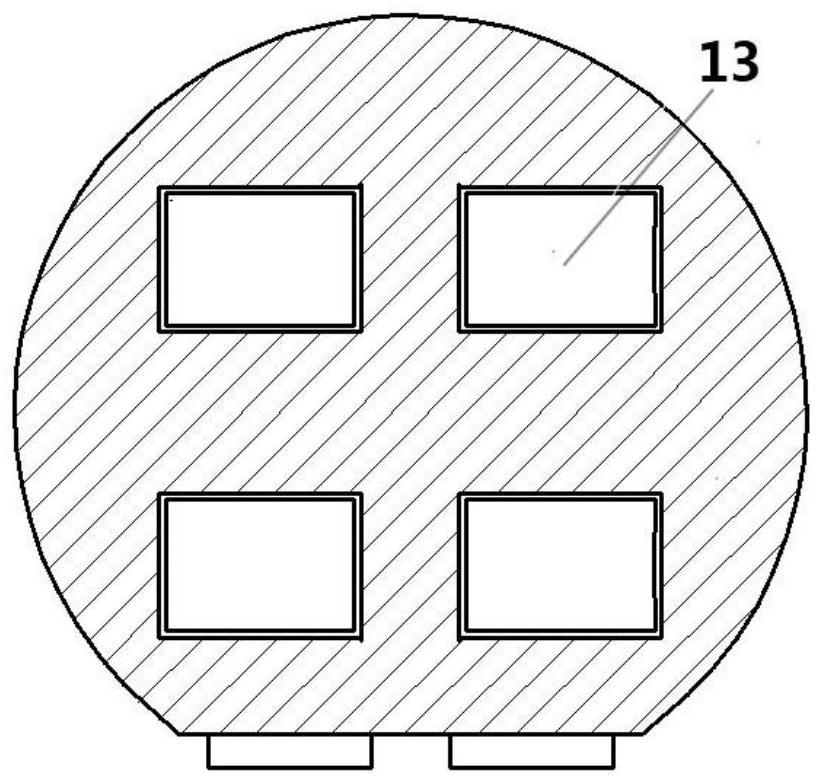
[0028] The present invention relates to a crawling soft robot driven by a thermal deformation cavity, which is composed of a motion base, an actuation system, a foot expansion system and a signal system; the motion base consists of three identical unit bodies 4, a head 1, a first The foot group 5 and the second foot group 6 are formed, and the inside of the first foot group 5 and the second foot group 6 is provided with a cavity, and the first foot group 5 and the second foot group 6 are all composed of 9 For the composition of the feet, they are evenly arranged at the bottom of the three unit bodies 4 of the movement matrix in sequence from left to right; the movement body is made of silicone rubber, and it is integrated through the process of feeding, plasticizing, injection, cooling and demoulding. Injection molding is compl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More