High-precision GPS positioning point obtaining method and system
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A GPS positioning point and acquisition method technology, applied in the field of GPS positioning, can solve problems such as expensive calculations, failure to achieve accuracy values, failure to remove location information, etc., and achieve the effect of improving accuracy
Active Publication Date: 2016-10-12
XIAMEN MEIYA PICO INFORMATION
View PDF6 Cites 11 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Because the average value algorithm calculates the average value through all the measurement data, it cannot remove the position information with obvious errors, and cannot achieve the best accuracy value; or use other more complex algorithms, although the matching effect can be achieved, but it needs It consumes a lot of calculations and the matching efficiency is low
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0069] Please refer to figure 2 as well as Figure 5 , Embodiment 1 of the present invention is:
[0070] A method for obtaining a high-precision GPS positioning point, comprising:
[0071] S1: Obtain a GPS positioning point data set; specifically, it may be S11: Perform dimension reduction processing on the GPS positioning point data, and map it into one-dimensional longitude data and latitude data; for example, obtain 10 GPS positioning point data, respectively A(2.01, 6.31), B(2.20, 6.31), C(2.01, 6.53), D(2.43, 6.10), E(2.10, 6.23), F(2.14, 6.10), G(2.13, 6.32), H(2.23, 6.14), I(2.21, 6.21), J(2.31, 6.24), when actually processing, the data of each GPS point is not numbered, and the numbering here is to better explain the subsequent steps; after dimension reduction processing , the 10 GPS positioning point data are respectively mapped to two one-dimensional data to obtain a set of corresponding longitude data [2.01, 2.20, 2.01, 2.43, 2.10, 2.14, 2.13, 2.23, 2.21, 2.31]...
Embodiment 2
[0081] Please refer to Figure 4 , the second embodiment of the present invention is:
[0082] A high-precision GPS positioning point acquisition system, comprising:
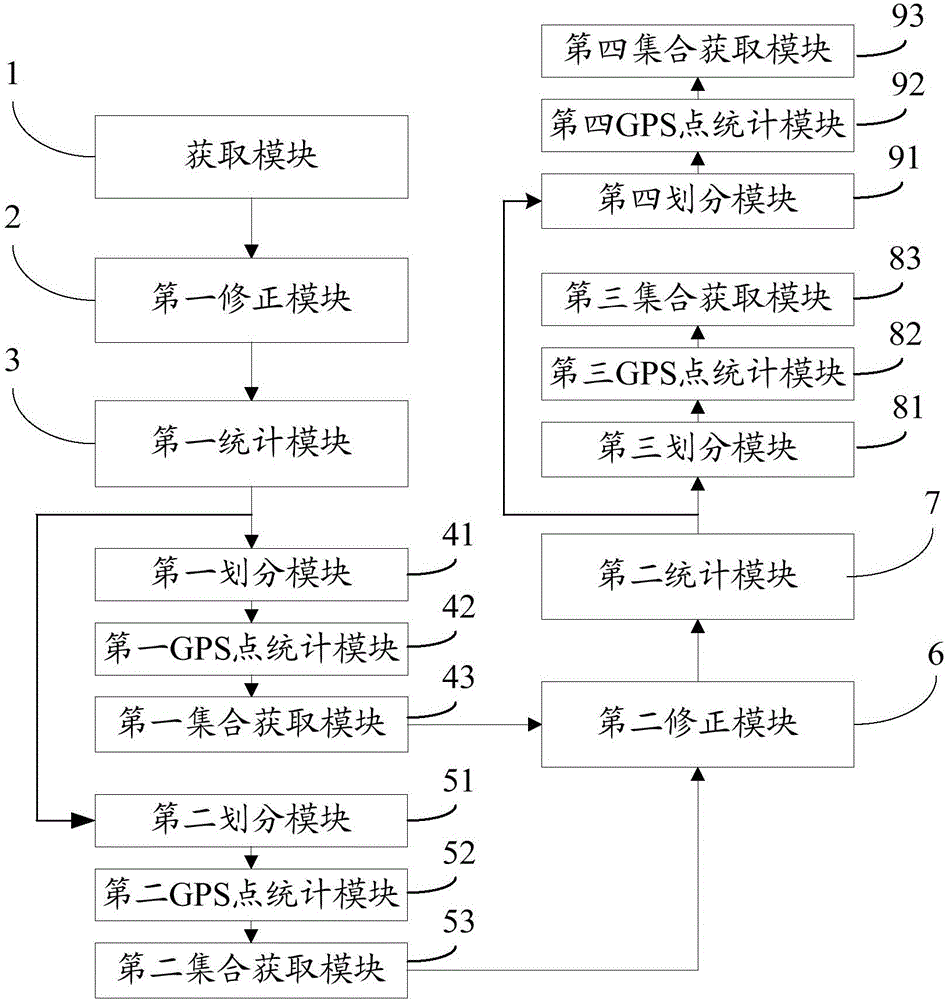
[0083] The obtaining module 1 is used to obtain the GPS positioning point data set; the mapping module 11 is used to map the two-dimensional data of the GPS positioning point into one-dimensional longitude data and latitude data respectively after obtaining the GPS positioning point data set;
[0084] The first correction module 2 is used to correct the longitude data and latitude data in the GPS positioning point data set respectively by using a preset precision factor, and remove invalid digits in the longitude data and latitude data;
[0085] The first statistical module 3 is used to set the unit interval of the histogram according to the precision factor, and perform histogram statistics on the corrected longitude data and latitude data respectively according to the unit interval; specifically, the length o...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
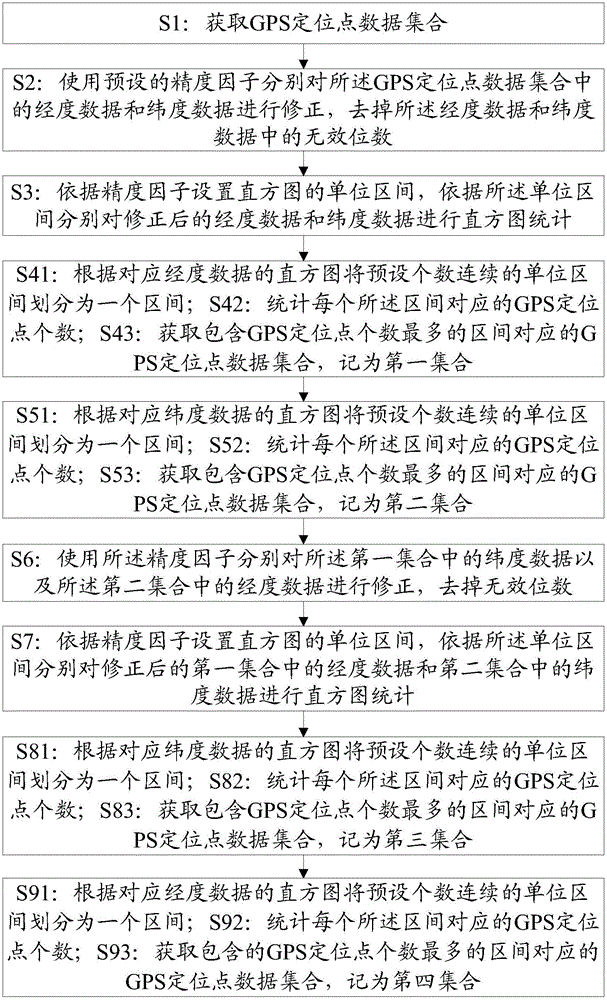
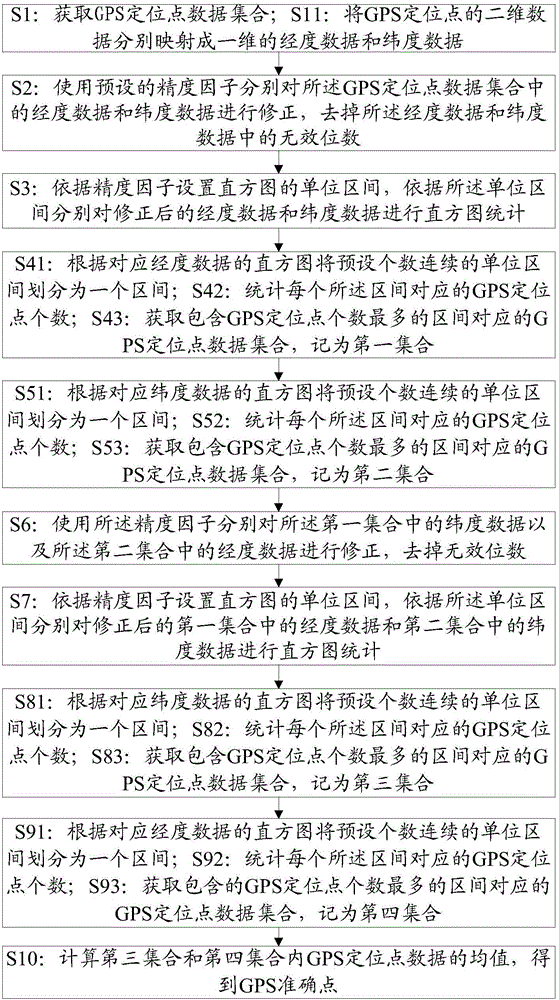
The invention provides a high-precision GPS positioning point obtaining method and system. The method comprises: a GPS positioningpoint data set is obtained; non-effective bits of longitudinal data and latitude data in the GPS positioningpoint data set are removed by using a preset precision factor; on the basis of the precision factor, unit zones of histograms are set and histogram statistics is carried out on the longitudinal data and latitude data after correction; according to the histograms of the longitudinal data and latitude data after correction, a corresponding zone with the largest GPS positioning point number among a preset number of continuous unit zones is obtained, and GPS positioning point data sets corresponding to the correction data in the zone are obtained and are marked as a first set and a second set; and after corresponding correction and statistics are carried out on the GPS point data in the first set and the second set, a third set and a fourth set that have the largest GPS positioning point number are obtained. Therefore, the third set and the four set that are close to GPS accurate point relatively are obtained, so that the precision is improved substantially.
Description
technical field [0001] The invention relates to the technical field of GPS positioning, in particular to a method and system for acquiring high-precision GPS positioning points. Background technique [0002] With the popularization of cloud technology and related mobile terminal applications based on GPS positioning, many developers use mobile terminal equipment and related applications to collect latitude and longitude data of a certain geographical location, and through multiple data collection and summary of a certain location, use to calculate latitude and longitude data for a location. Due to unpredictable factors such as the accuracy of latitude and longitude obtained by mobile terminal equipment and external interference, there are certain errors in the latitude and longitude data collected at the same location, and even obvious errors in the latitude and longitude data for testing. These erroneous data are difficult to be filtered manually or automatically by the ma...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More