robot collision avoidance system
A robot and anti-collision technology, which is applied in the direction of control/adjustment system, instrument, vehicle position/route/height control, etc., to solve technical problems and avoid collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention is further described in conjunction with the following examples.
[0013] Application Scenario 1
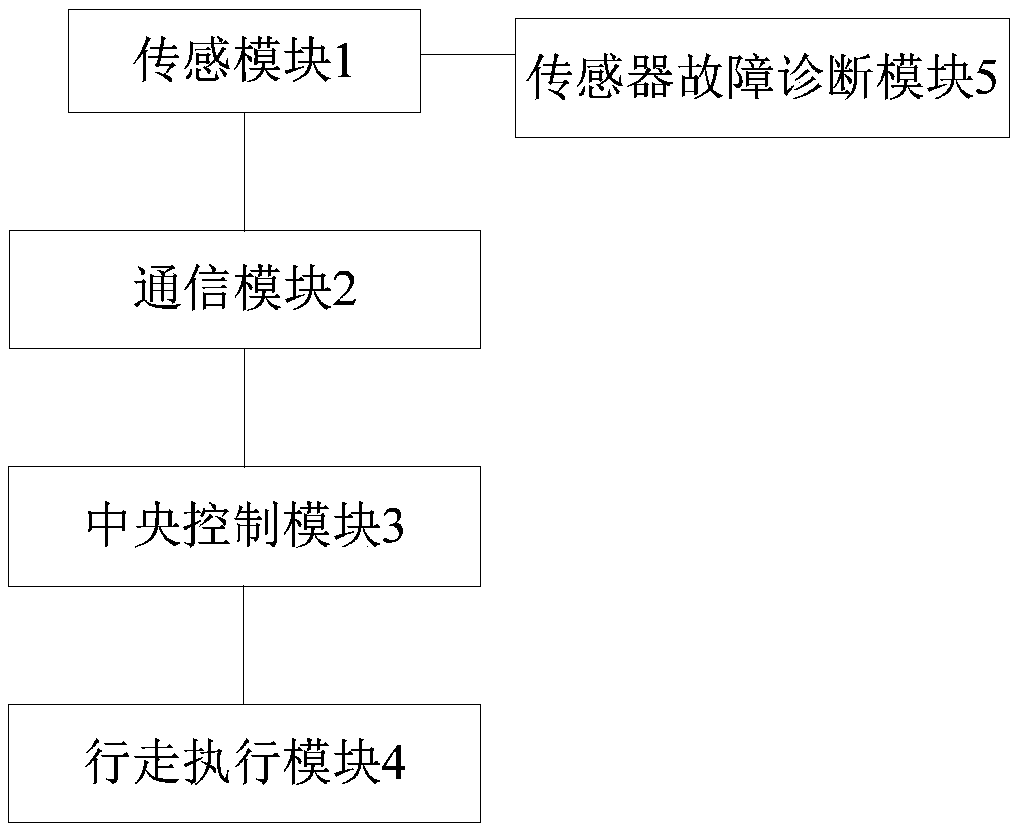
[0014] see figure 1 , figure 2 , the robot anti-collision system of an embodiment of this application scenario includes a sensing module 1, a communication module 2, a central control module 3 and a walking execution module 4; the sensing module 1 is used to sense whether there are people in the designated position of the robot In the activity area, the sensing result is transmitted to the central control module 3 through the communication module 2, and the central control module 3 controls the action of the walking execution module 4 according to the sensing result.
[0015] Preferably, the specified orientation includes front, left, and right.
[0016] In the above embodiments of the present invention, the sensor module 1 senses whether someone is in the activity area at the designated position of the robot, and then controls the action of the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More