

PID separated parameter setting method based on particle swarm algorithm
A technology of particle swarm algorithm and parameter tuning, which is applied in the direction of speed/acceleration control of electric mode, and can solve the problems of cost, long time, and difficult PID parameters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
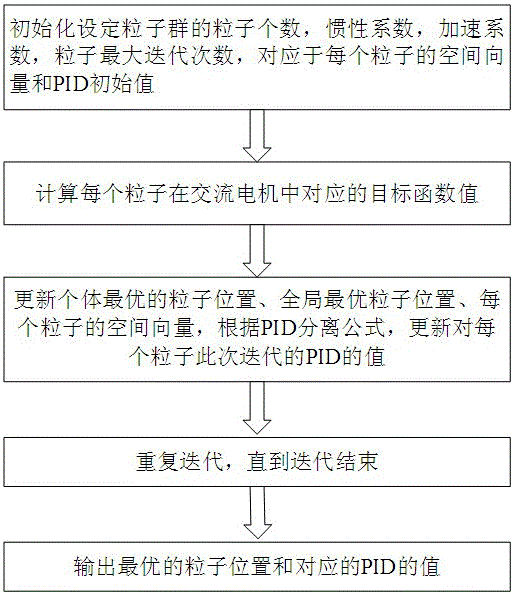
[0032] Such as figure 1 Shown, the steps of the present invention are as follows:
[0033] Step 1: Initialize and set the particle number n of the particle swarm, the inertia coefficient w, and the acceleration coefficient a 1 and a 2 , the maximum number of iterations m of the particle, the initial velocity v, the spatial component position of each particle and the initial value of the PID corresponding to each particle;
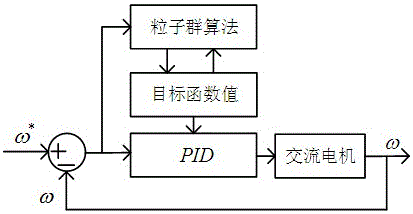
[0034] Step 2: Substitute the PID value corresponding to each particle in the particle swarm into the speed controller of the AC motor, such as figure 2 shown. Calculate and get the corresponding objective function value f, f=∫t|s-s ref |dt, where, s is the measured speed of the motor, s ref is the expected speed, and t is the time.
[0035] Step 3: Update the individual optimal particle position and the global optimal partic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More