

Foreground trajectory determination method and device based on feedback
A trajectory and foreground technology, applied in the field of foreground trajectory determination, can solve problems such as inability to handle non-planarity, serious time-consuming, failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
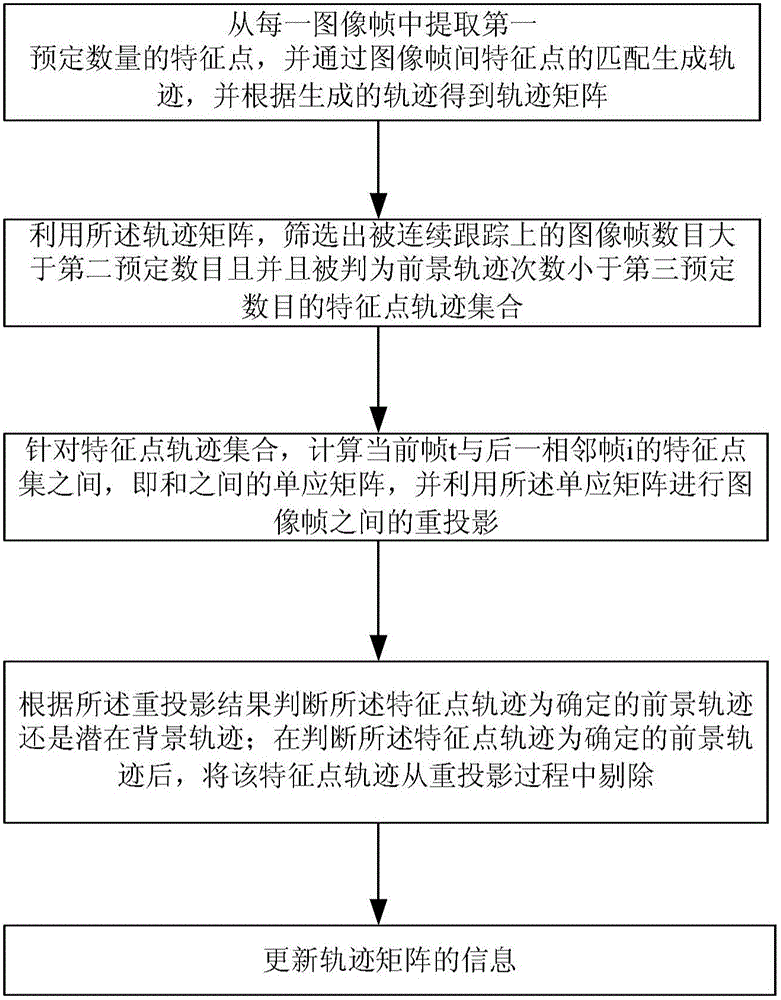
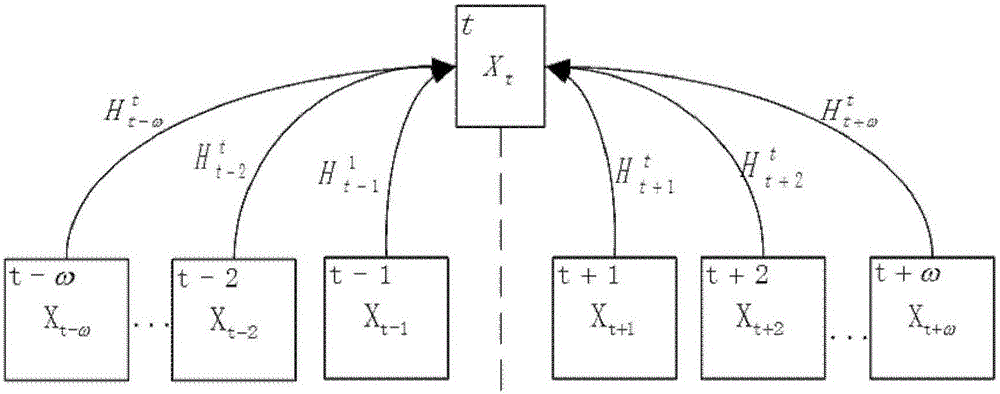
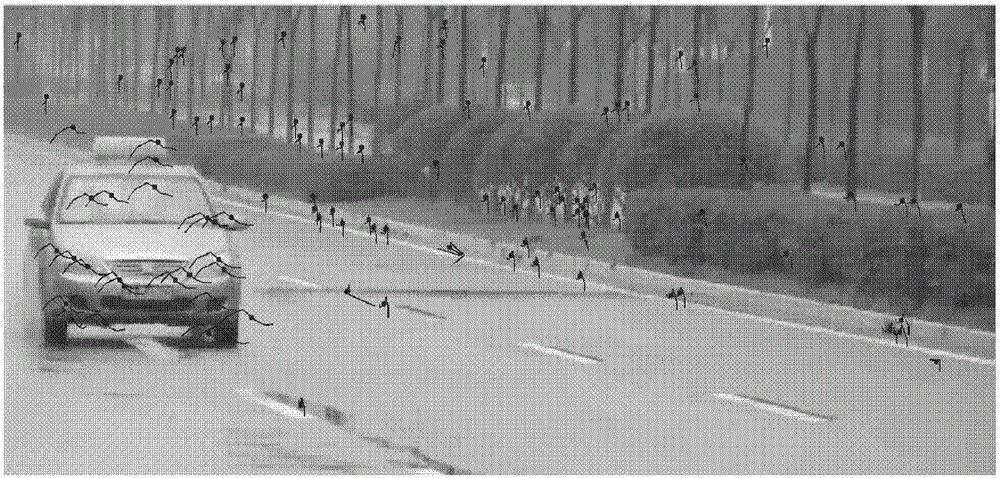
[0025] The present invention proposes a method and device for determining a foreground trajectory based on feedback, which can determine whether a feature point trajectory belongs to a moving object through 2*ω times of reprojection, so that the feature point trajectory belonging to the background can be compared with the characteristics of the foreground object. Separate the point trajectories. In this way, the subsequent video deshaking algorithm will smooth the background track, and then calculate the homography matrix used to generate stable frames according to the feature point track coordinates before and after smoothing. Using this feature point trajectory classification can ensure the robustness of the video desha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More