

Construction carrying intelligent robot based on parallel serial structure
An intelligent robot and building construction technology, applied in the direction of conveyors, mechanical conveyors, transportation and packaging, etc., can solve the problems of low handling efficiency, many hidden dangers of dangerous accidents, poor road conditions, etc., to achieve easy walking and movement, flexible movement The effect of high and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
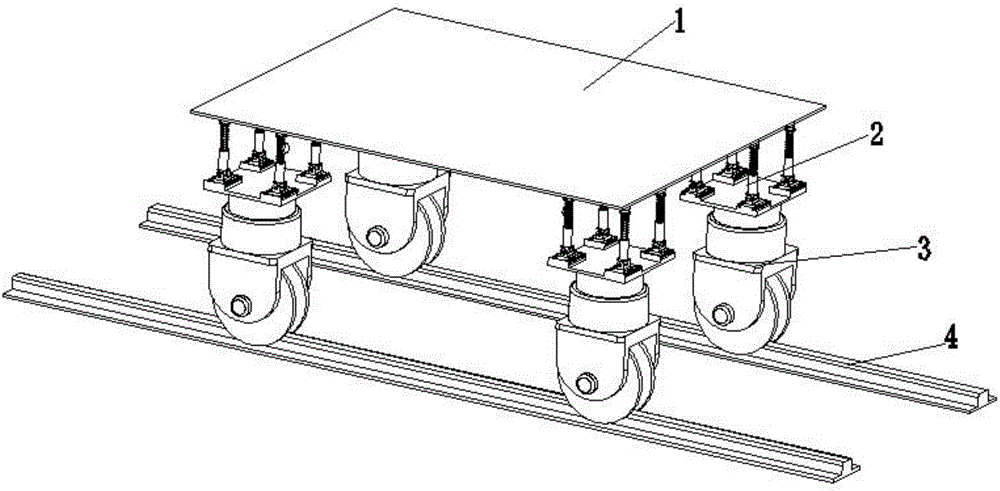
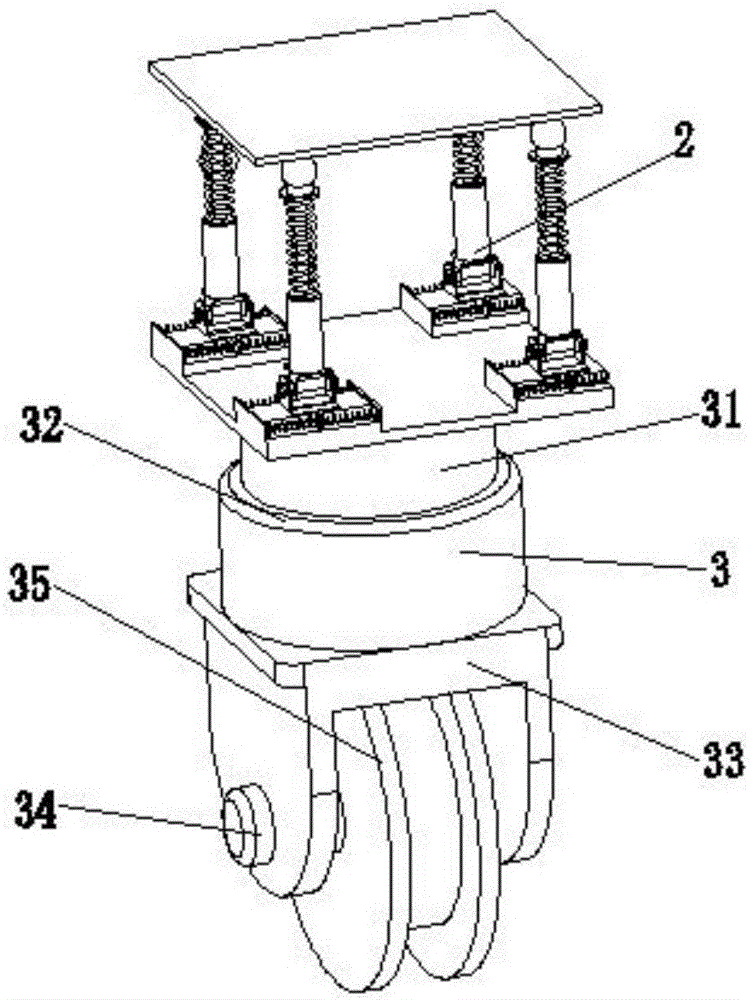
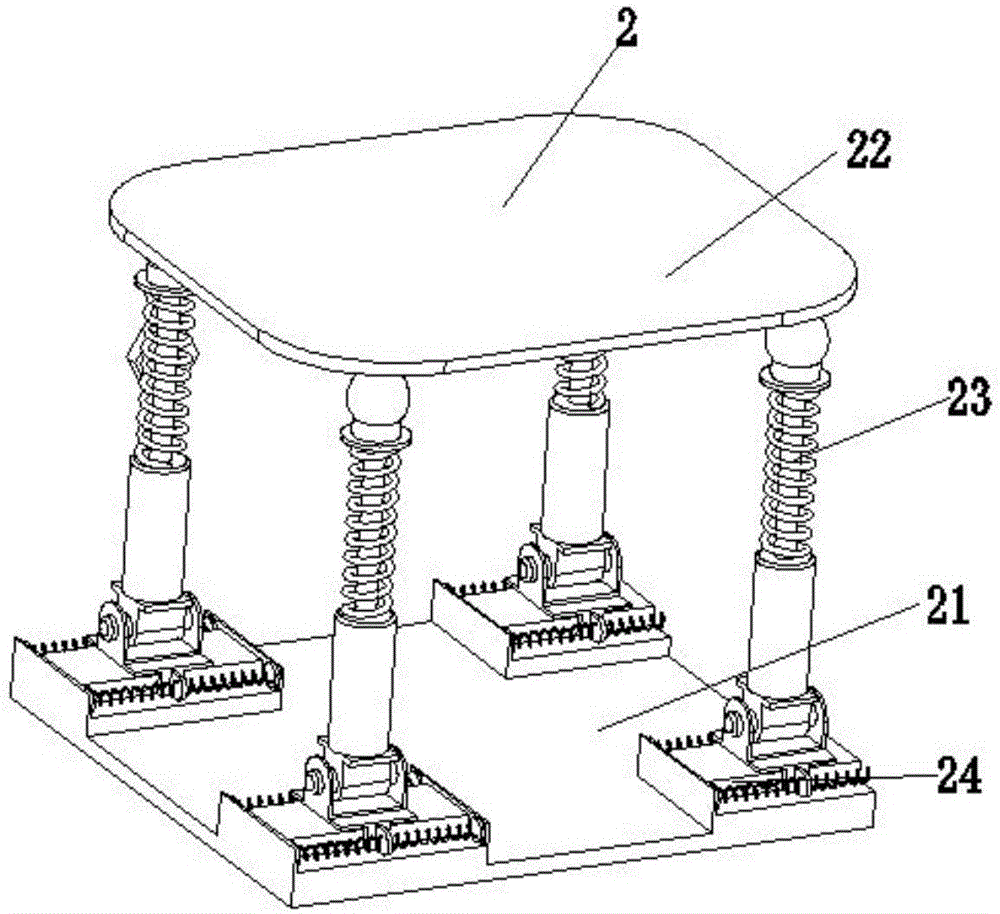
[0018] Such as Figure 1 to Figure 5 As shown, a building construction and handling intelligent robot based on a hybrid structure includes a handling platform 1, a hybrid vibration table 2, a walking device 3 and a track 4, and the number of the hybrid vibration table 2 and the walking device 3 is four; The conveying platform 1 described above is a rectangular plate structure, and the material of the conveying platform 1 is 45 steel material, the hybrid vibrating table 2 is respectively located at the four corners of the conveying platform 1, and the hybrid vibrating table 2 and the bottom end surface of the conveying platform 1 Connected by bolts, the traveling device 3 is located directly below the hybrid vibrating table 2, and the upper end o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More