

Obstacle-crossing rescue robot based on parallel mechanisms
A rescue robot and parallel technology, which is applied to vehicle ambulance, wheels, medical transportation, etc., can solve problems such as inability to pass normally, poor shock absorption effect of ambulances, delay in patient rescue time, etc., to increase height and prevent deviation Movement, overcoming the effect of vehicle shake
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
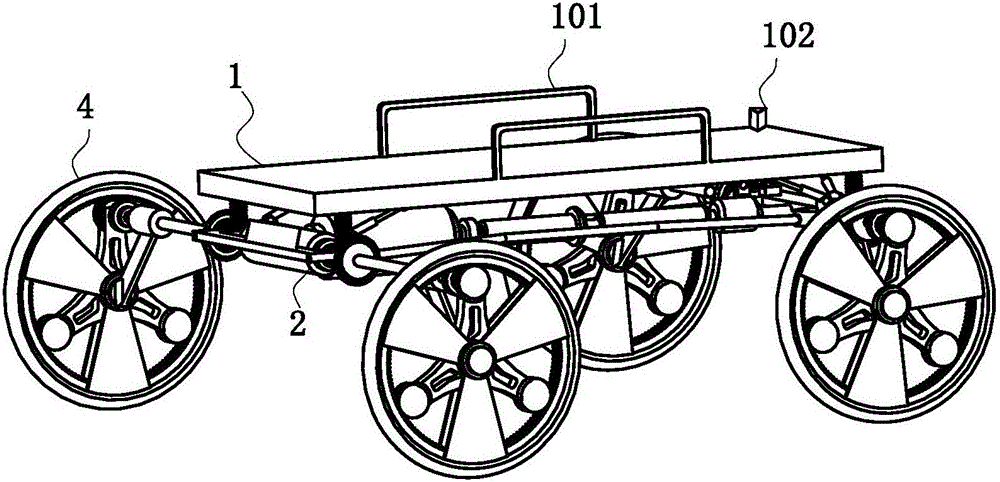
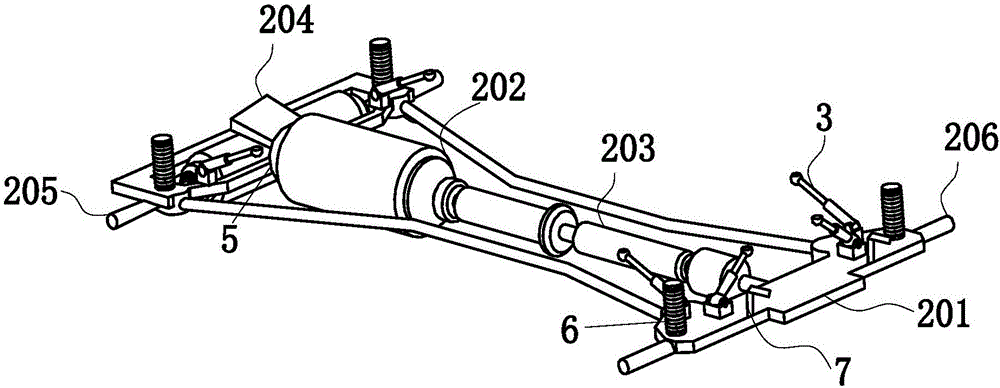
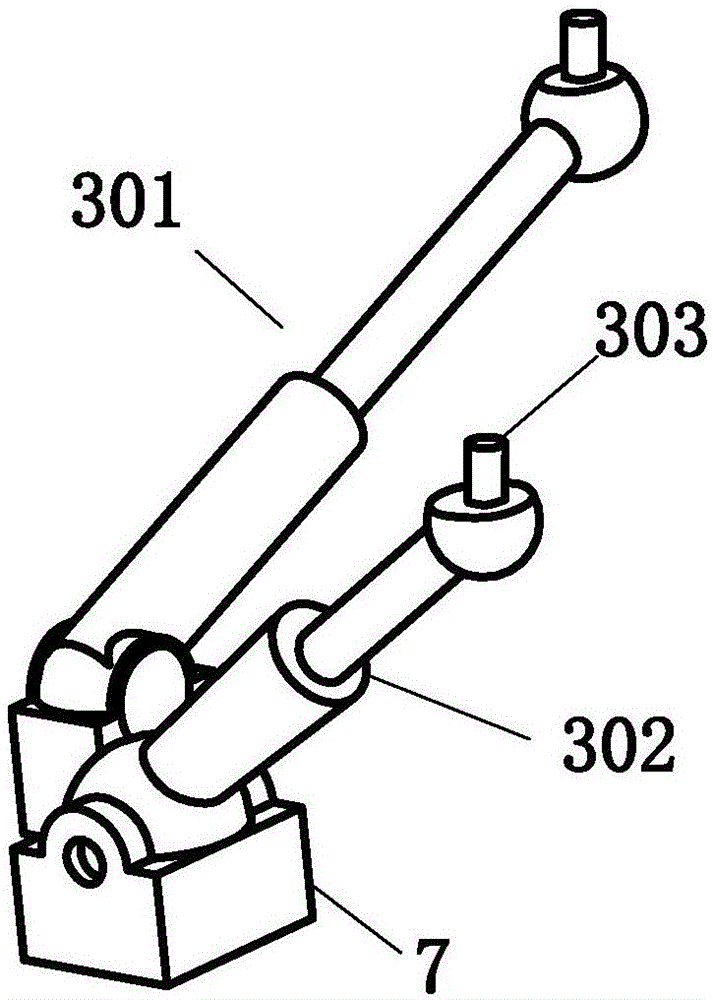
[0028] Such as figure 1 and figure 2 As shown, an obstacle rescue robot based on a parallel mechanism includes an ambulance stretcher 1, an ambulance chassis 2, a six-degree-of-freedom parallel mechanism 3, four planetary wheels 4, a three-stage damping clutch 5, and four shock absorbers 6 and two lighting lamps 7, characterized in that: the ambulance stretcher 1 is located above the ambulance chassis 2; the six-degree-of-freedom parallel mechanism 3 is located at the front and rear ends of the ambulance chassis 2, and the six-degree-of-freedom parallel mechanism 3 and The ambulance stretcher 1 is connected; the four planetary wheels 4 are used as the four running wheels of the ambulance chassis 2; the three-stage damping clutch 5 is installed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More