

Electric wheelchair capable of walking up and down stairs
A technology for electric wheelchairs and wheelchairs, which can be applied to patient chairs or special transportation tools, vehicle rescue, medical transportation, etc., and can solve the problems of inconvenient use, high price, and complex structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
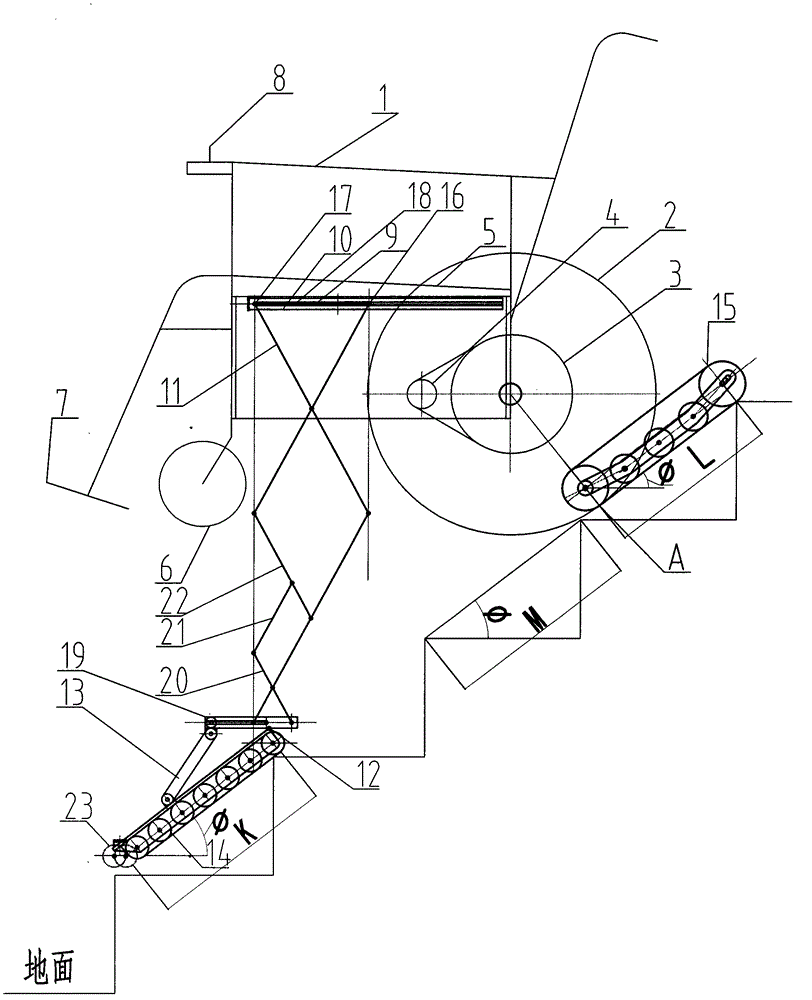
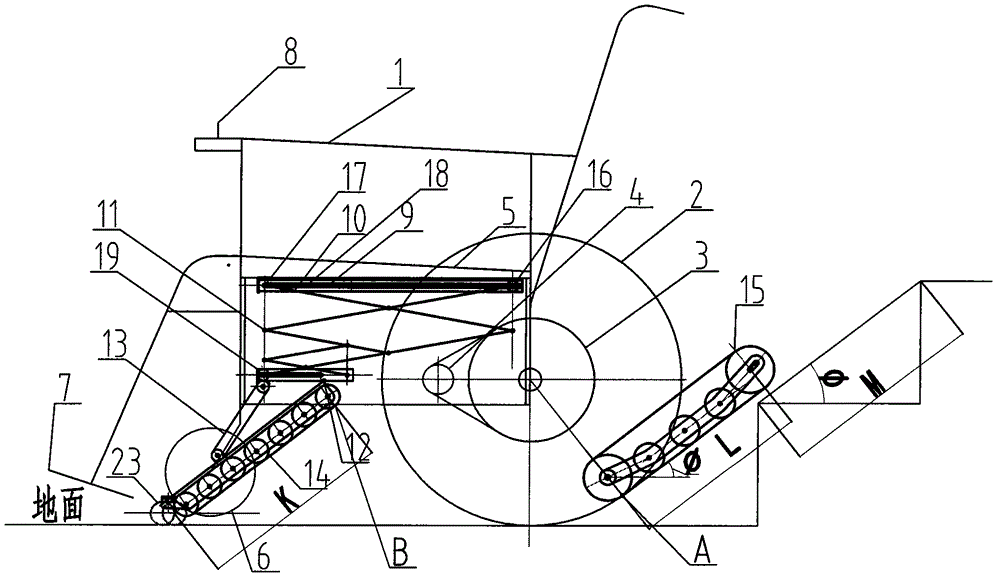
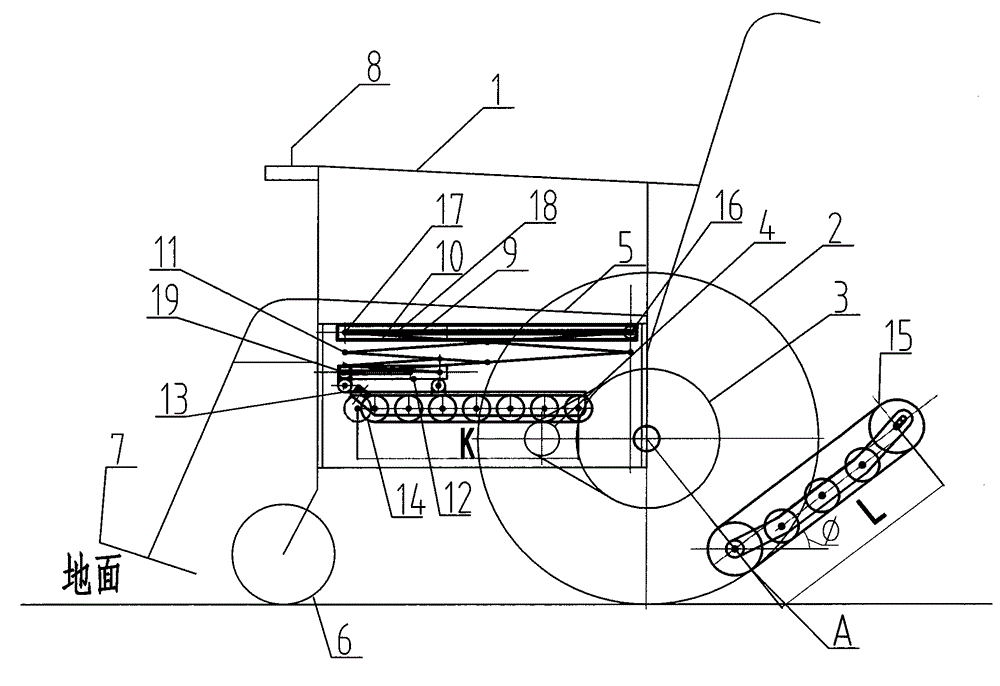
[0014] refer to figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 Given structure, shown in (1), (2), (3), (4), (5), (6), (7), (8) among the figure is that the existing production can be on level ground An electric wheelchair that runs on twin rear wheels with independent drive. A person sits on the seat (5), puts his feet on the pedal (7), adjusts the control handle (8) to rotate the motor, and the motor output gear (4) is driven by a chain (or gear set) and fixed to the rear wheel (2) The gears (3) together drive the rear wheels to rotate, the wheelchair can move forward or backward, and the wheelchair can turn when there is a differential speed between the two rear wheels. The power that wheel transmits turns to automatically (accumulator is not drawn in the figure).
[0015] A crawler track (15) is respectively installed near the rear inner side of the rims (generally steel or aluminum alloy products) of the two rear wheels (2) now, and the inclination angle φ ...
Embodiment 2
[0041] According to the structure given in Example 1, when the diameter of the rear wheel is greater than or equal to 20 inches, refer to Figure 6 , an annular base plate (23) is installed on the inboard of the rear driving wheel of the wheelchair, and several stair climbing bars (25) that can slide in the slideway (24) are arranged along the base plate, between the slideway (24) and the stair climbing bar (25) ) between springs (26), the top of the stair climbing rod (25) is provided with rollers (27) on one side of the center of the drive wheel, and when the rollers (27) do not apply external force, the sliding stair climbing rods (25) are placed on the spring (26 ) is at the extreme position towards the center of the drive wheel. A briquetting block (28) is respectively set in the fourth quadrant of the two rear wheels (2) (the part that can touch the stairs when going upstairs backwards), and this briquetting block is concentric with the rear wheel, and is fixed together ...
Embodiment 3
[0053] According to the structure provided by Embodiment 1 and 2, when the wheelchair goes upstairs or downstairs, the operator needs to operate the operating lever (8) at any time to make the wheelchair run, and also operate the switches K1, K2, K3, K4 to keep the wheelchair running. The seat is always in the normal position, and such an operation is very troublesome and not easy to grasp. Now the wheelchair is equipped with an angle detection device (such as a gyroscope) JDJC, which can detect the angle deviation α between the front and rear direction of the wheelchair and the horizontal line, and the angle deviation β between the left and right direction and the horizontal line. The detected α signal is processed by the circuit. Automatically control K1 and K2 to automatically adjust the offset between the front and rear directions of the wheelchair and the horizontal line, and keep the front and rear directions of the seat in a normal position; the detected β signal is proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More