

Dynamic obstacle avoidance system and method for industrial robot grasping process
An industrial robot, dynamic obstacle avoidance technology, applied in the field of object manipulation of robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
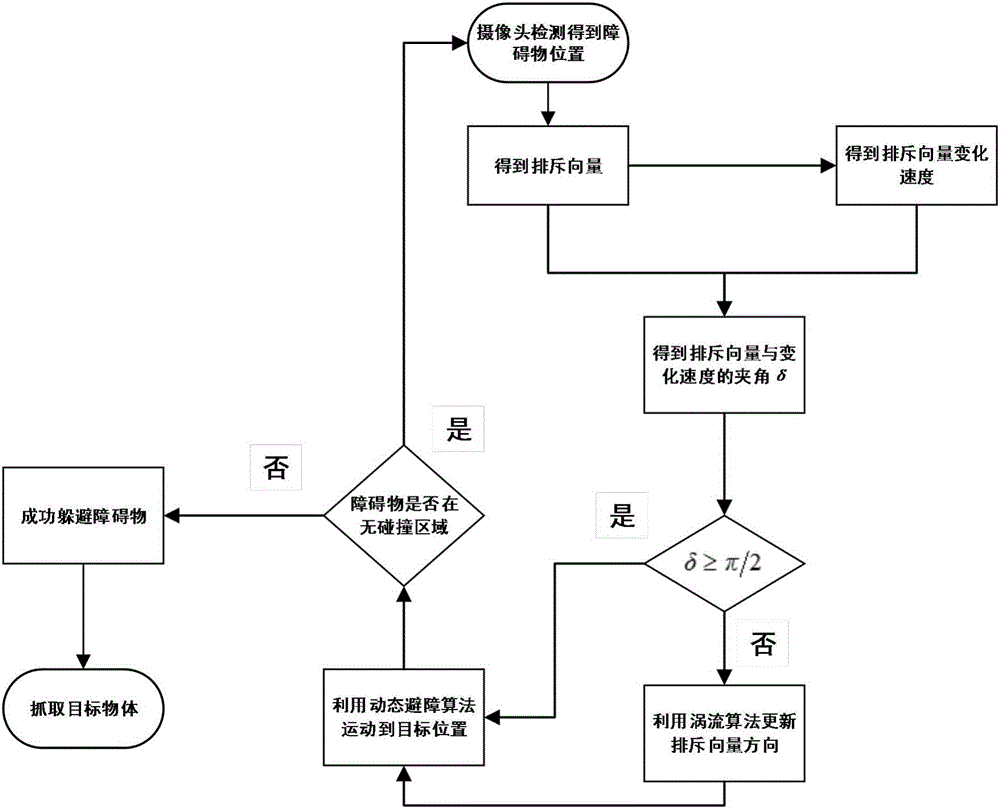
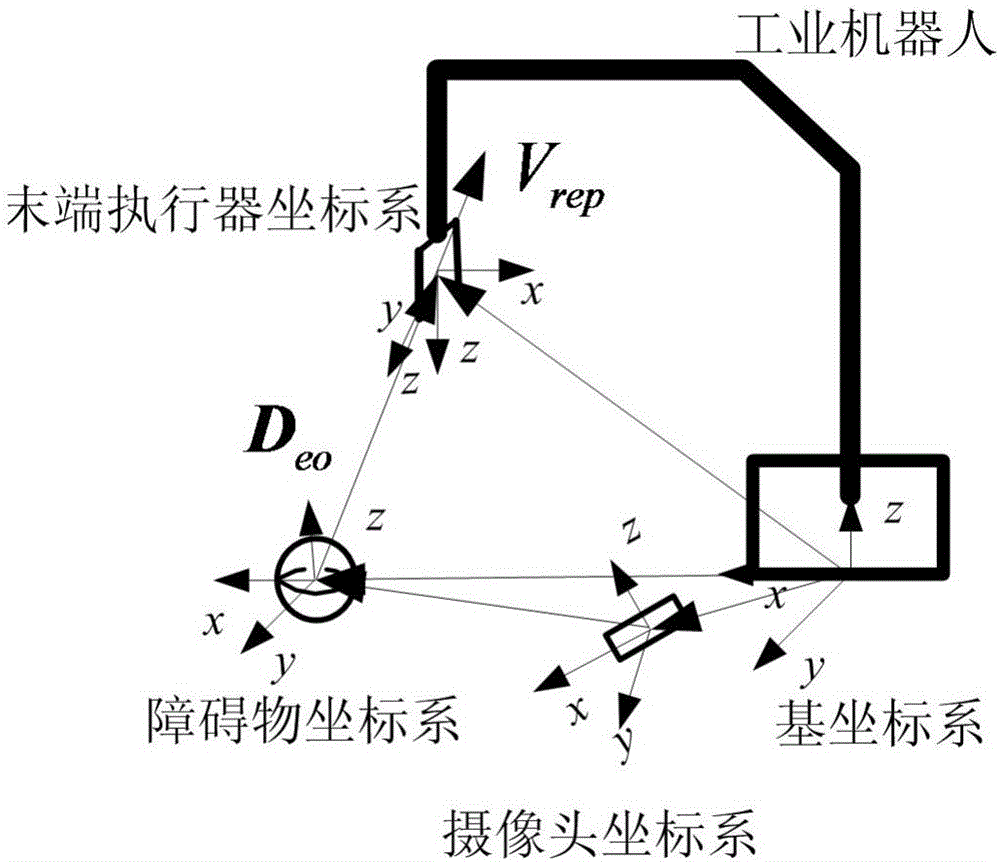
[0063] The technical solution provided by this embodiment can realize obstacle avoidance and grasping of industrial robots in a dynamic environment. On the one hand, the relative motion relationship between the robot end effector and the moving obstacle and the update direction of the repulsion vector are obtained by the repulsion vector and eddy current algorithm; on the other hand, the dynamic obstacle avoidance algorithm, an efficient obstacle avoidance algorithm, is used to solve The position to which the end effector should move to successfully avoid obstacles. Therefore, it is necessary to construct the repulsion vector between the end effector and the obstacle, and use the eddy current algorithm to update the direction of the repulsion vector, so as to design a dynamic obstacle avoidance method based on the eddy current algorithm to avoid dynamic obstacles and complete the grasp. Specifically,
[0064] In this embodiment, a dynamic obstacle avoidance system in the gras...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More