

Sliding groove toggle connecting rod straight-line parallel clamping self-adaptive robot finger device
A robot finger, self-adaptive technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problem that it cannot adapt to stable envelope grasping of objects of various shapes, is difficult to achieve the effect of parallel gripping at the end, and cannot achieve self-adaptation. and other problems, to achieve the effect of light weight, stable and reliable grasping, and large grasping range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
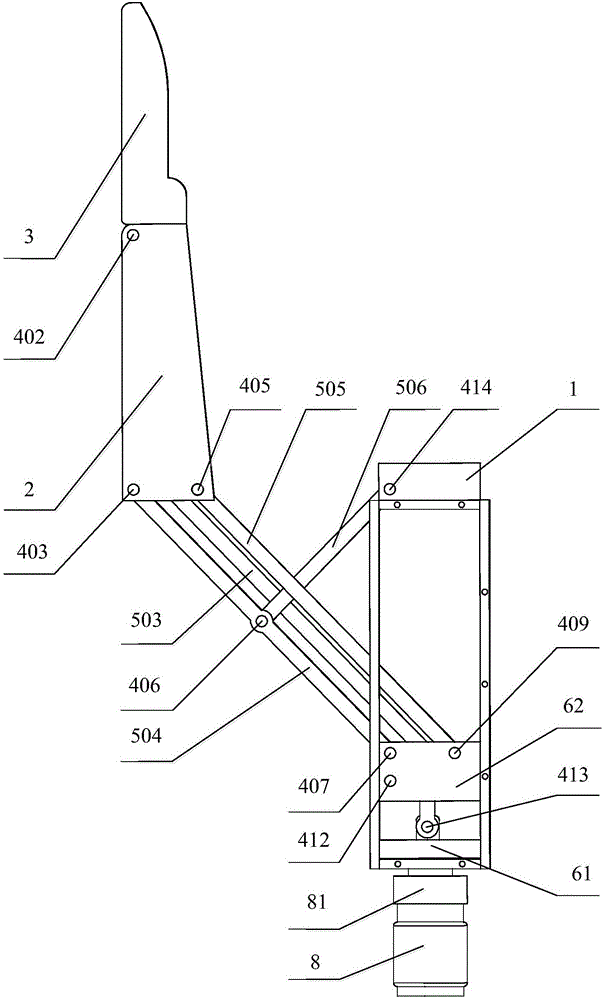
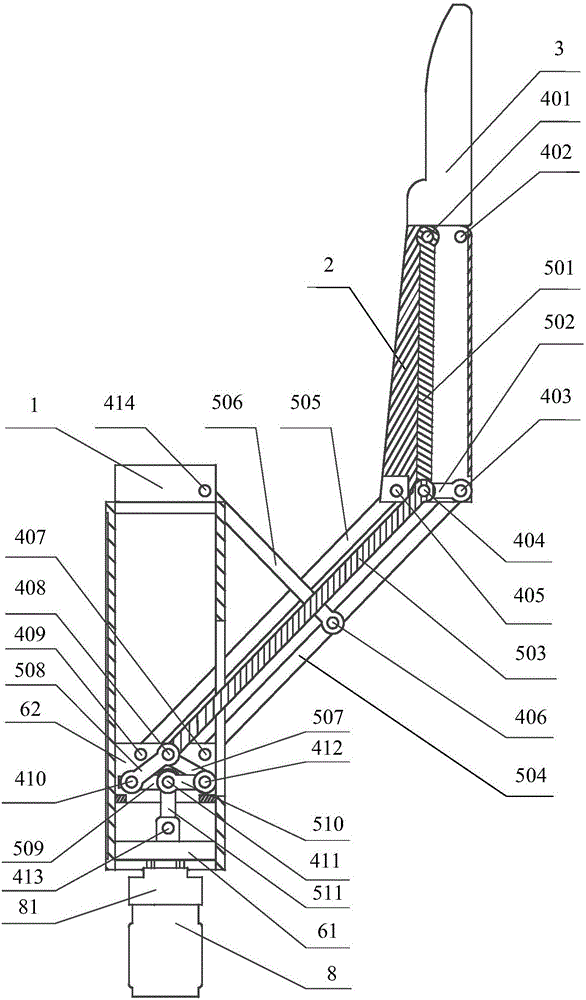
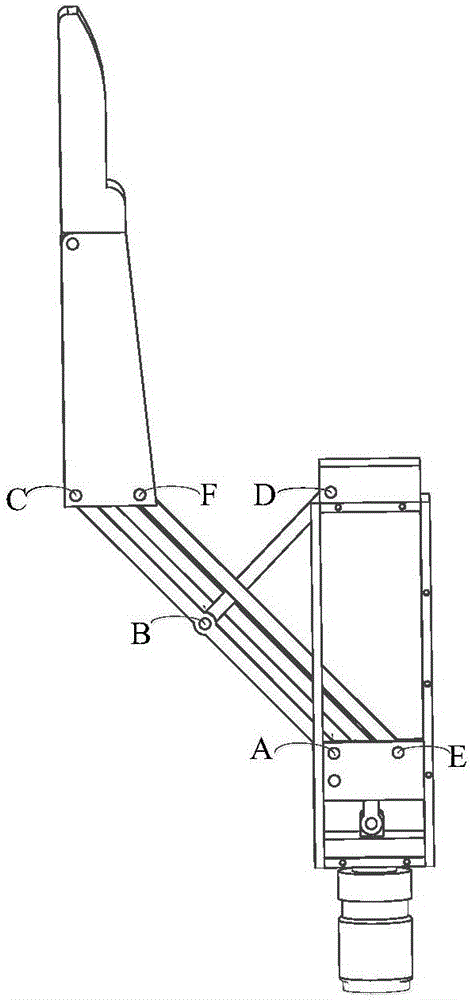
[0035] A kind of embodiment of the self-adaptive robot finger device of the chute toggle connecting rod straight-line flat clip that the present invention designs, as Figure 1 to Figure 7 As shown, it includes a base 1, a first finger section 2, a second finger section 3, a transmission mechanism 81 and a driver 8; The input shaft is connected; the chute toggle connecting rod linear flat clip adaptive robot finger device also includes a first connecting rod 501, a second connecting rod 502, a third connecting rod 503, a fourth connecting rod 504, and a fifth connecting rod 505. , the sixth connecting rod 506, the seventh connecting rod 507, the eighth connecting rod 508, the ninth connecting rod 509, the tenth connecting rod 510, the eleventh connecting rod 511, the first slider 61, the second sli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More