

A quick-release end effector for a space manipulator
A space manipulator and end effector technology, applied in the field of space detection, can solve the problem of no quick release, etc., and achieve a reliable locking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below with reference to the accompanying drawings and examples.
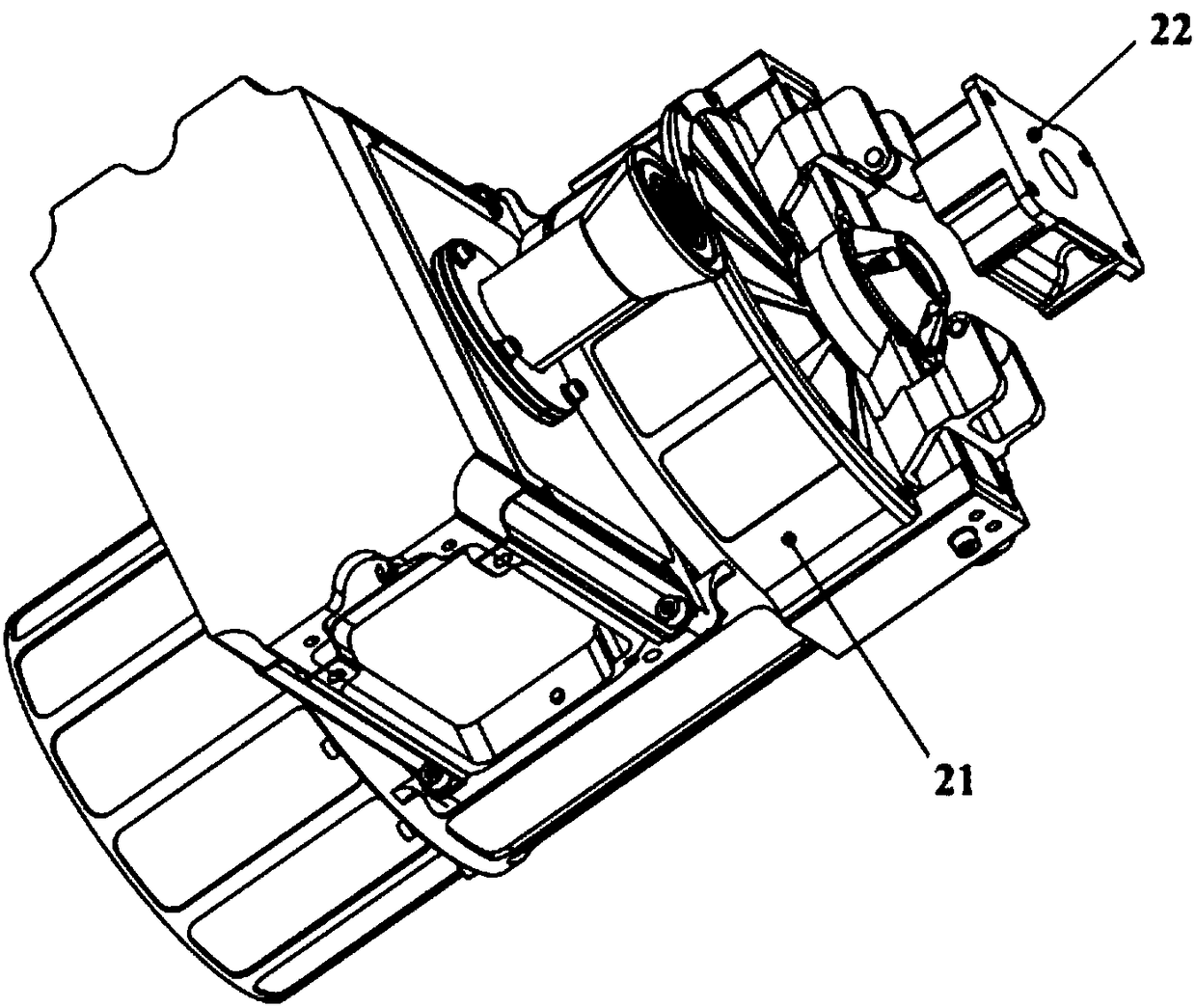
[0028] as attached figure 1 As shown, the present invention provides a quick-release end effector for a space manipulator, which is composed of two parts: an end effector and a target adapter;
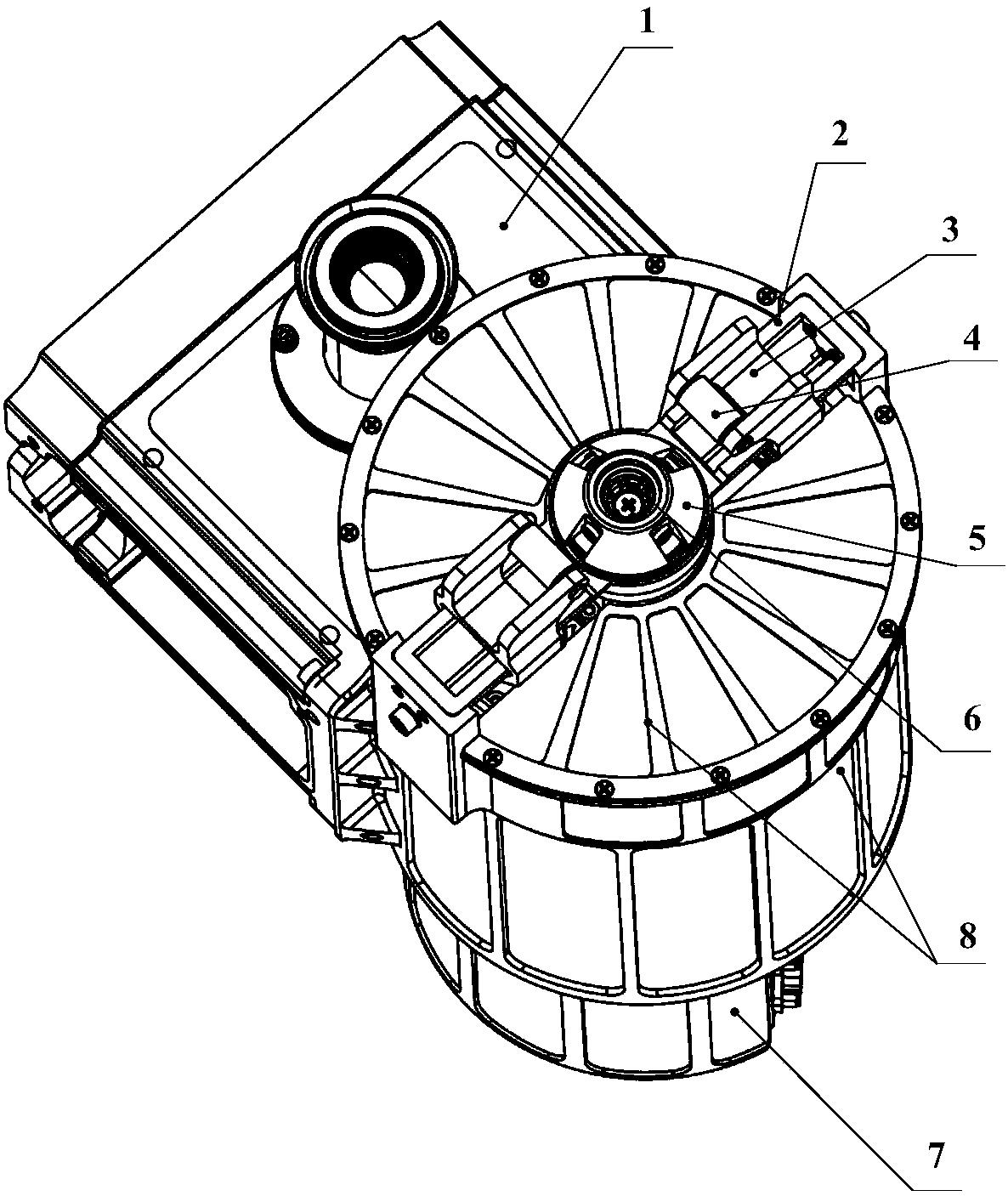
[0029] as attached figure 2 As shown, the external structure of the end effector mainly includes a camera 1, a guide rail 2, a locking claw 3, a locking claw roller 4, a conical compression ring 5, a power output interface 6, a driver 7 and a housing 8;
[0030] The camera 1 is installed on the outer surface of the housing 8, the power output interface 6 is located at the center of the upper surface of the housing 8, the conical compression ring 5 is concentric with the power output interface 6, the guide rail 2 is installed on the top of the housing 8, and the locking pawl 3 Slidingly matched with the guide rail 2, the front end of the lock claw 3 is equipped w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More