

Precision translation gripper
A translational and precise technology, applied in the direction of transportation and packaging, conveyor objects, etc., can solve the problems of low grasping precision and complex gripper structure, and achieve the effect of increasing grasping precision, simplifying structure and increasing effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
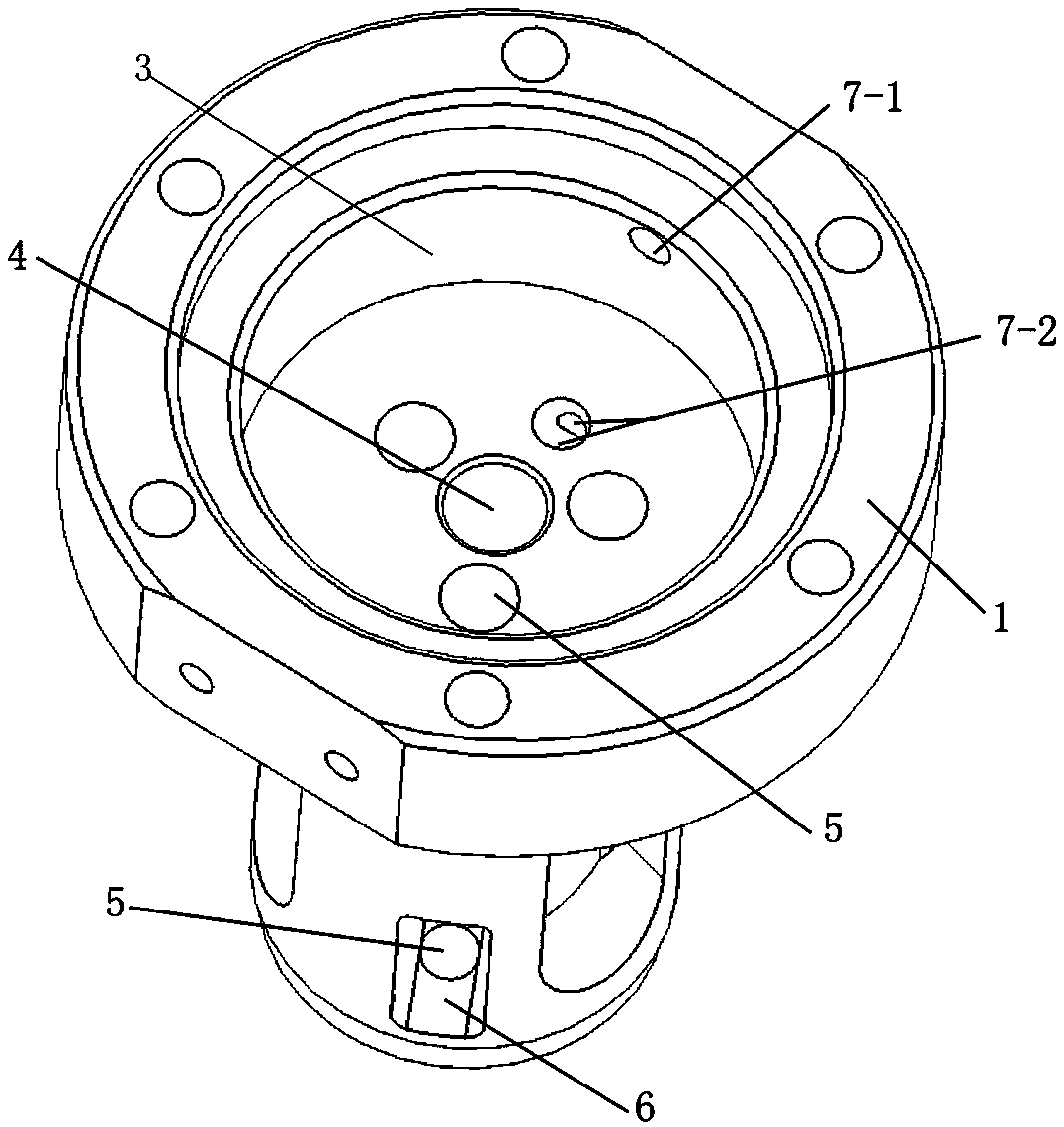
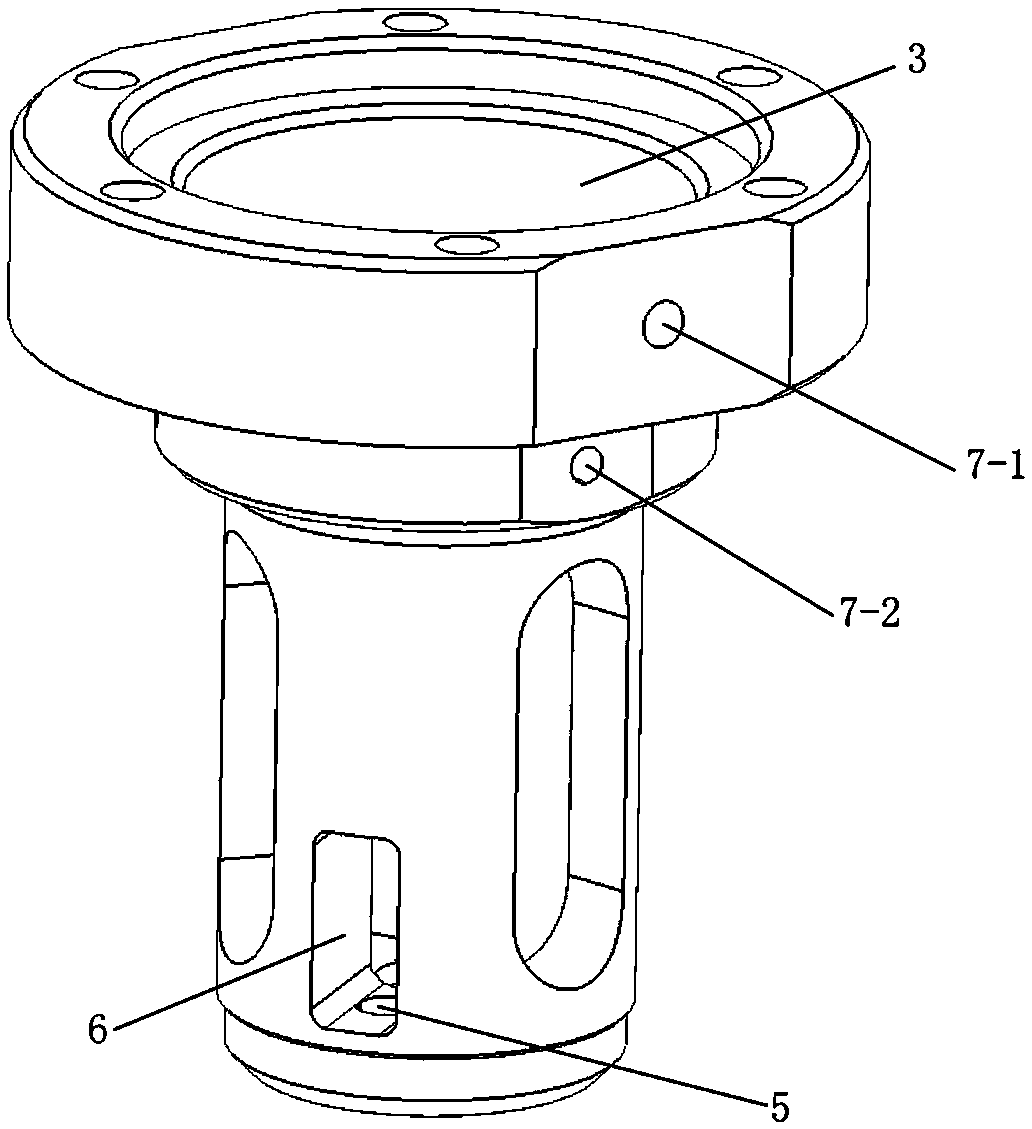
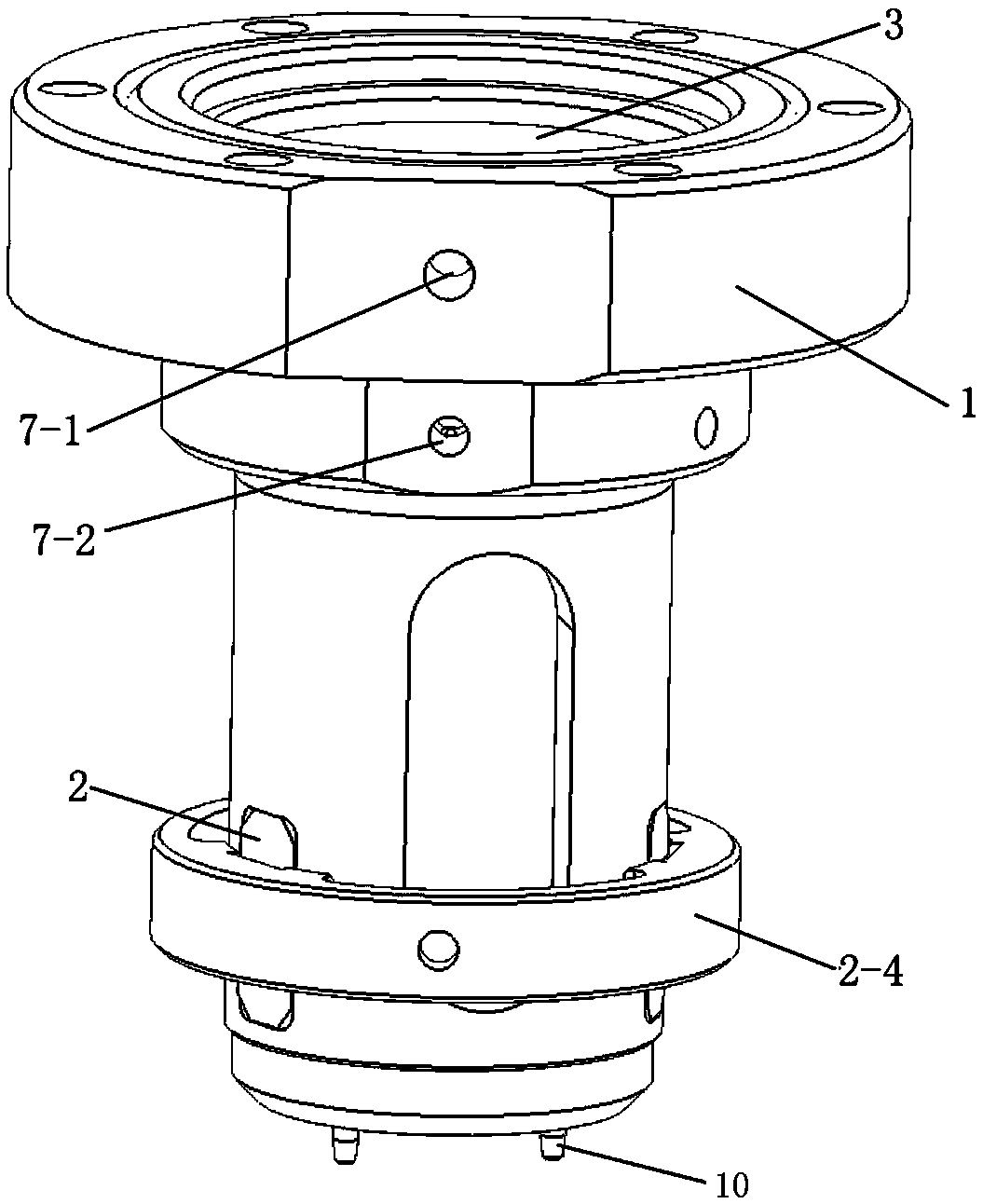
[0030] like Figure 1-9 As shown, the precision translation gripper of the present invention includes gripper 1 body, piston with strut, positioning rod and 2 strut sliders, the upper part of the 1 gripper body is provided with 3 cavities, and the 3 1 gripper body below the cavity body is provided with 4 strut holes, 5 positioning holes 1 and 6 chute, the 6 chute traverses through 4 strut holes and 5 positioning holes 1, and the 5 positioning holes pass through Through the bottom surface of the 1 gripper body; the piston with the struts includes 7 pistons and 8 struts, the 8 struts are fixedly connected to the bottom surface of the 7 pistons, and the 7 pistons move up and down in the 3-cavity body, so The 8 struts are slidably installed in the 4 strut holes; the positioning rods include 9 telescopic springs and 10 positioning pins, the 9 telescopic springs are installed in the 5 positioning holes one, and the 10 positioning pins are located below the 9 telescopic springs; The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More