

A Differential Mobile Robot Odometer Calibration Method
A mobile robot and calibration method technology, applied in the field of differential mobile robot odometer calibration, can solve the problems of low efficiency, large measurement error, poor accuracy, etc., and achieve the effects of avoiding low efficiency, enriching calibration methods, and reducing workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
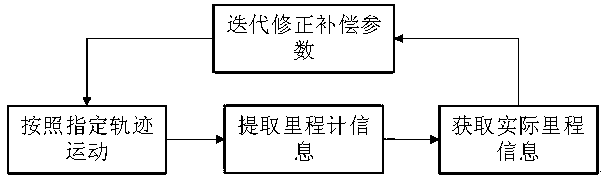
[0049] The invention provides a method for calibrating the odometer of a differential mobile robot, which solves the technical problems of low efficiency, poor precision and large measurement error in the existing differential mobile robot calibration method, and realizes the calibration efficiency and accuracy of the differential mobile robot High technical effect.
[0050] In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be noted that, under the condition of not conflicting with each other, the embodiments of the present application and the features in the embodiments can be combined with each other.
[0051] In the following description, many specific details are set forth in order to fully understand the present invention. However, the present invention can also be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More