

Robot interactive behavior control method, device and robot
A control method and control device technology, applied in the field of robotics, can solve the problems of lack of adaptability, etc., and achieve the effect of facilitating control, improving adaptive interactive behavior ability and intelligent degree
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Reference will now be made in detail to the embodiments depicted in the accompanying drawings. In the following detailed description, numerous specific details are set forth in order to provide a thorough understanding of the present invention. However, it will be understood by those skilled in the art that the present invention may be practiced without these specific details. In other instances, well-known methods, procedures, components, and circuits have not been described in detail so as not to unnecessarily obscure the embodiments.
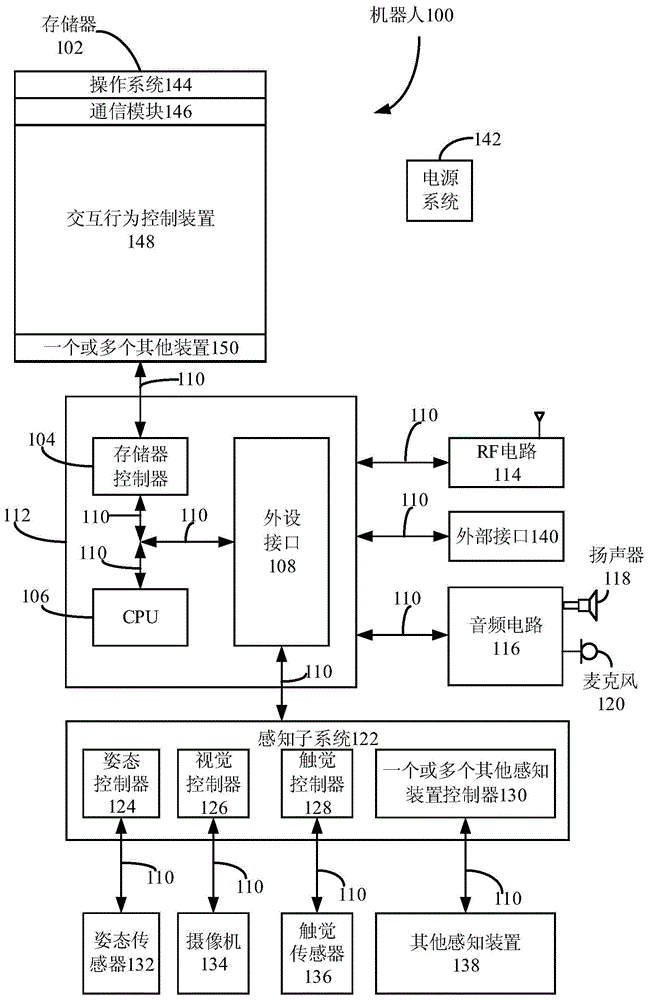
[0026] figure 1 A schematic diagram illustrating the structure of a robot according to some embodiments of the present invention. Robot 100 includes memory 102, memory controller 104, one or more processing units (CPUs) 106, peripherals interface 108, radio frequency (RF) circuitry 114, audio circuitry 116, speaker 118, microphone 120, perception subsystem 122, gesture Sensor 132 , camera 134 , tactile sensor 136 and one or more oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More