

Clamping rotary cutting type underactuated two-finger grape picking device
An underactuated, rotary cutting technology, applied in the field of agricultural robots, can solve problems such as low picking efficiency and mechanical damage, and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
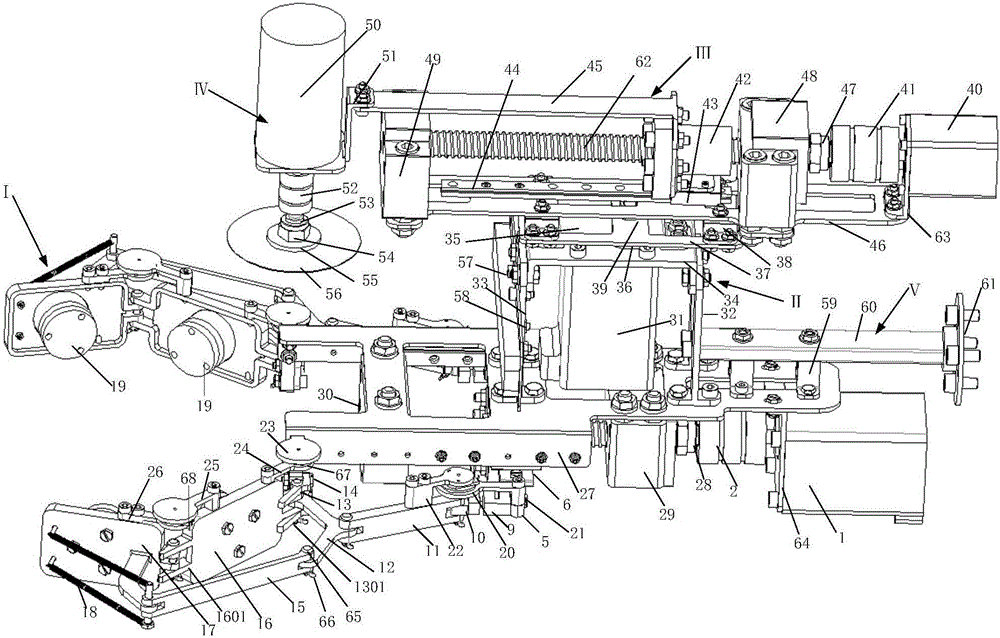
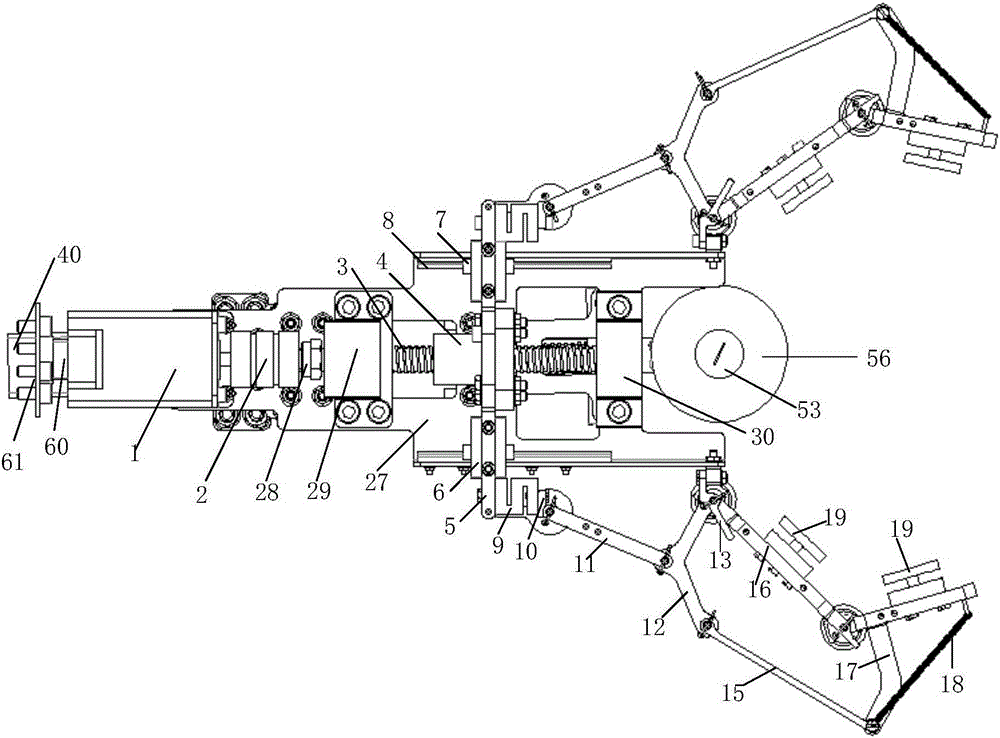
[0046] Such as figure 1 and 2 As shown, a clamping rotary cutting under-actuated two-finger hand grape picking device includes an under-actuated finger mechanism I, a rotating mechanism II, a pushing mechanism III, a rotary cutting mechanism IV, a wrist connecting mechanism V, a main support plate 27 and two Eye camera 57.
[0047] Such as figure 1 and 2 As shown, the underactuated finger mechanism I includes a motor A1, a guide rail slider mechanism G and a link mechanism L; the guide rail slider mechanism G includes a motor fixing seat A64, a coupling A2, a lock nut A28, a ball wire Bar A3, nut A4, transverse slide block A5, transverse slide block B6, guide rail slide block A7, guide rail A8, leading screw fixing seat A29, leading screw supporting seat A30; the stru...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More