

Navigation image matching filtering method based on K-means clustering algorithm
A technology of k-means clustering and filtering method, which is applied in the direction of navigation calculation tools, calculations, computer components, etc., can solve problems such as slow calculation speed, model error, image misjudgment, etc., to improve calculation speed and accuracy , the effect of improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
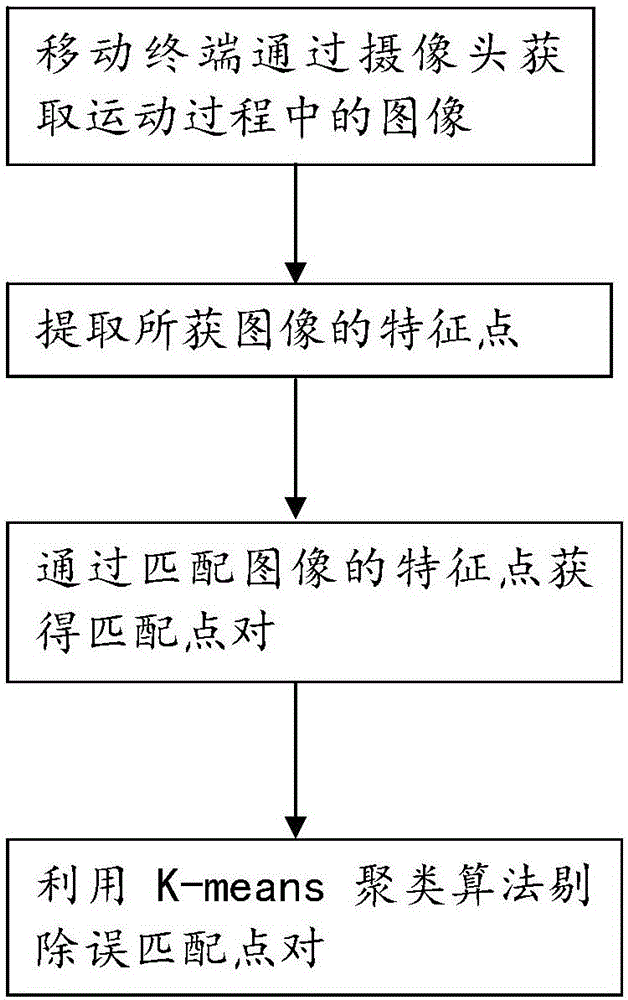
[0029] The present invention overcomes the aforementioned deficiencies in the prior art, uses the K-means clustering algorithm to eliminate mismatching point pairs, obtains accurate matching point pairs, realizes calibration of coordinate positions, improves the accuracy of image matching, and improves the accuracy of navigation paths. Thereby, the accuracy rate of mobile terminal navigation is improved.
[0030] Specific embodiments of the present invention w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More