

Deepwater drilling sand sampling robot
A deep-sea drilling and robot technology, which is applied in drilling equipment, underwater drilling, drill bits, etc., can solve the problems of low reliability of submarine drilling equipment, insufficient depth of drilling equipment, and complex structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical content disclosed in this application more detailed and complete, reference may be made to the drawings and the following various specific embodiments of the present invention, and the same symbols in the drawings represent the same or similar components. However, those skilled in the art should understand that the examples provided below are not intended to limit the scope of the present invention. In addition, the drawings are only for schematic illustration and are not drawn according to their original scale.
[0021] The specific implementation manners of various aspects of the present invention will be further described in detail below with reference to the accompanying drawings.
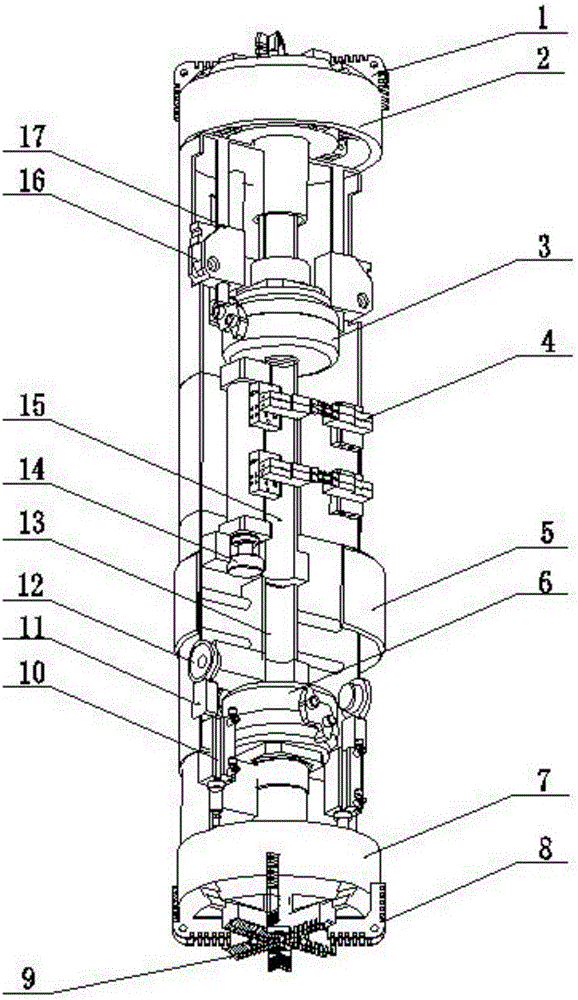
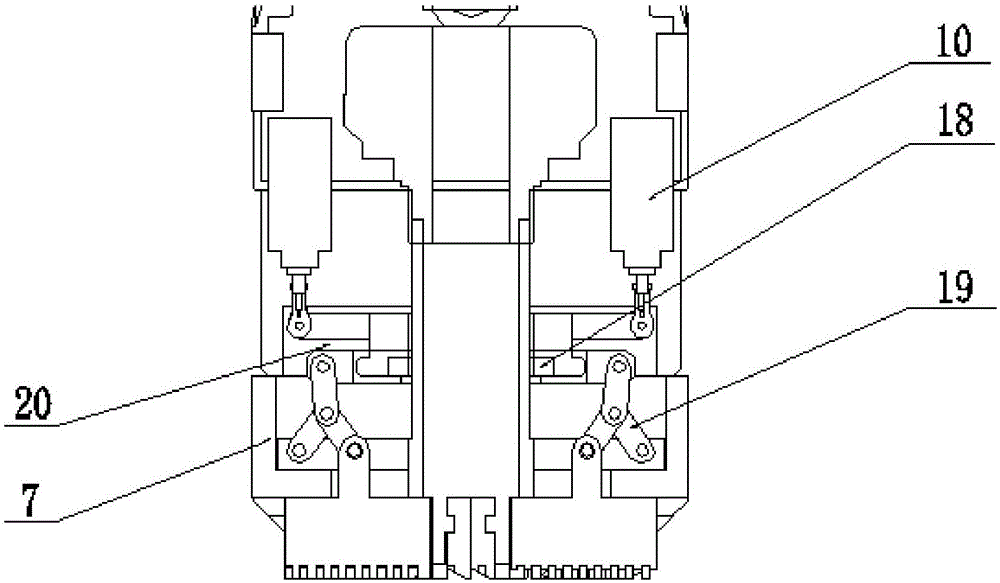
[0022] figure 1 It shows a schematic structural view of a deep-sea drilling and sampling robot according to an embodiment of the present invention, figure 2 Shows figure 1 Partial cross-sectional view of the front drill bit of the deep-sea drilling and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More