

Exoskeleton assisting mechanism for lower limb
A technology of power assist mechanism and exoskeleton, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of small rotation angle and insignificant change of rotation center, and achieve the effect of strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below in conjunction with the accompanying drawings.
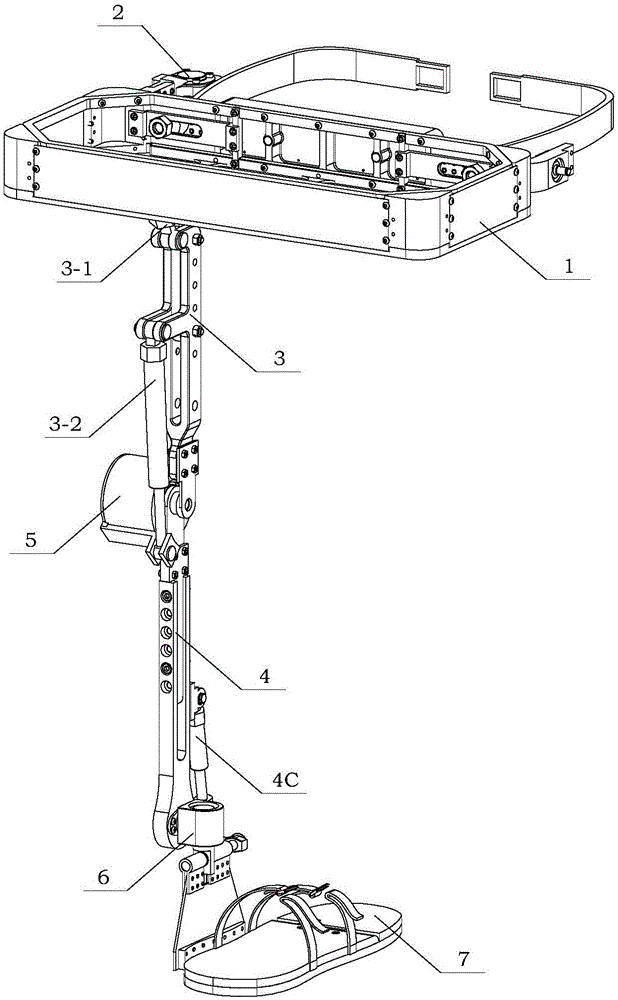
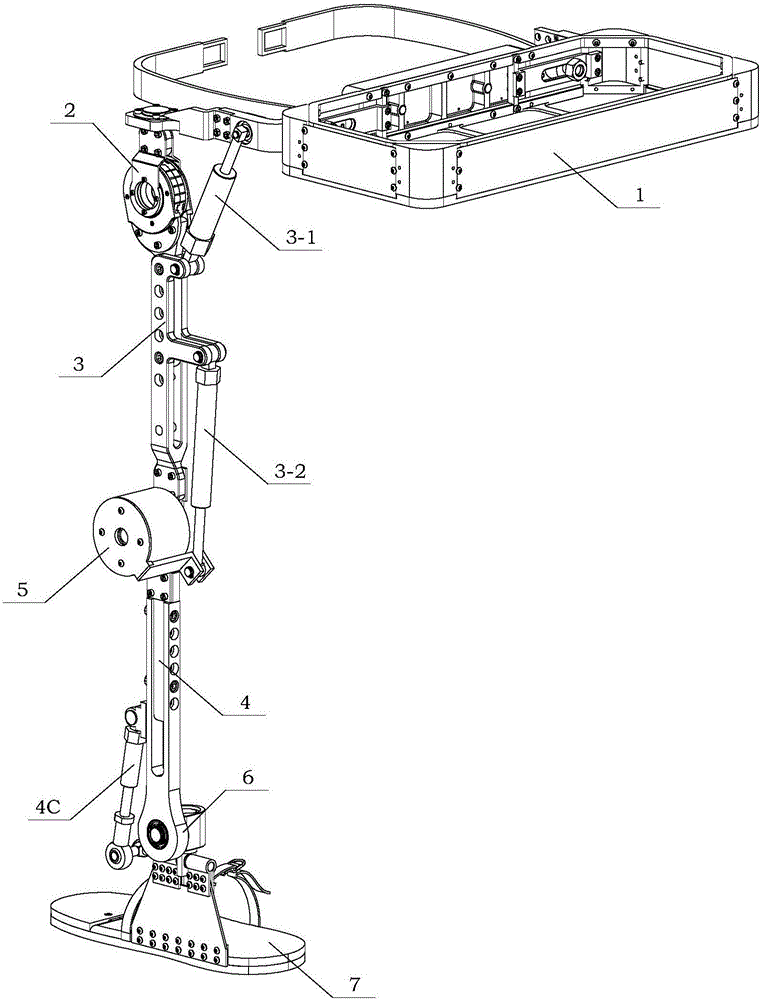
[0040] See figure 1 , Figure 1A As shown, the present invention designs a lower limb exoskeleton assist mechanism, which includes a waist bearing unit 1, a thigh unit 3, a calf unit 4, and a foot unit 7. The division according to the human joints can also be divided into hip joint unit 2, knee joint unit 5 and ankle joint unit 6. The fixed installation of the waist carrying unit 1 and the thigh unit 3 is through the connection of the AA connector 1E and the CE connector 3H. The fixed installation of the thigh unit 3 and the calf unit 4 is through the connection of the CB connector 3B and the calf adjustment rod 4B, and the calf unit 4 The fixed installation with the foot unit 7 is through the connection between the calf swing rod 4G and the ankle joint shaft 7A. The lower limb exoskeleton assist mechanism of the present invention is a single-leg seven-degree-o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More