

Crawler garbage conveying sanitation robot and control method thereof
A control method and robot technology, applied in the field of robots, can solve the problems of difficult garbage, picking up, and difficult garbage suction, etc., and achieve the effect of improving cleaning efficiency, simple structure and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] Embodiments of the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, and therefore are only examples, rather than limiting the protection scope of the present invention.
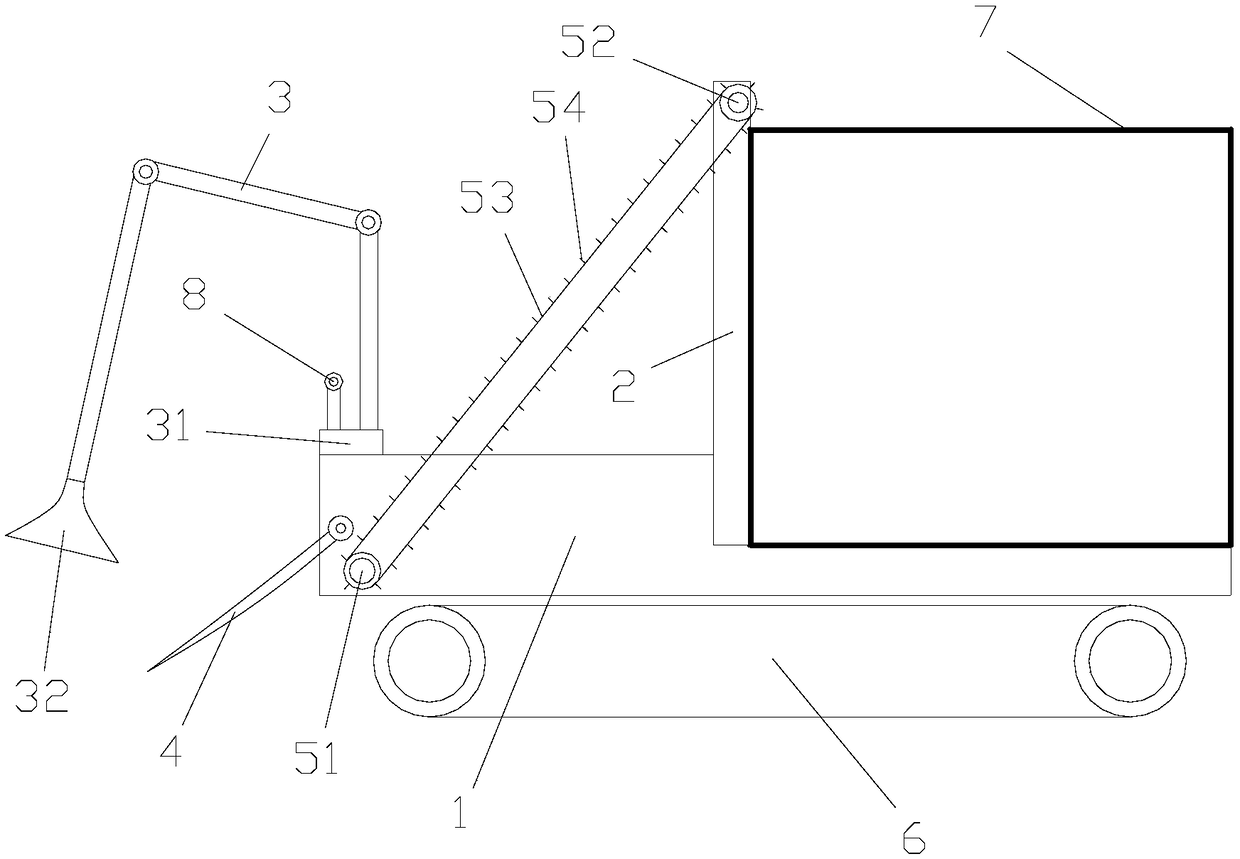
[0033] First aspect, such as figure 1 As shown, the embodiment of the present invention provides a crawler-type garbage conveying sanitation robot, including a chassis 1, a mechanical arm 3, a garbage shovel 4, a transmission mechanism, a battery and a host; a moving mechanism 6 driven by a drive motor is arranged below the chassis 1 , in order to better adapt to the terrain, the moving mechanism 6 is preferably a track wheel moving mechanism; the top surface of the rear part of the chassis 1 is provided with a garbage box body 7, and the front side of the garbage box body 7 top surface is provided with an opening,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More